3D-3D:ICP
3D-3D:ICP
- ICP算法
- SVD方法
- 3.非线性优化方法
1. ICP算法
2D-2D问题是通过已知的2D图像坐标点对来求解图像间的变换关系(即 R R R 和 t t t)。3D-2D问题是通过已知的3D空间点坐标和对应的2D像素坐标来求解图像的位姿。 所以很显然,3D-3D问题是根据已知的3D空间点对来求解图像图像间的变换关系。
假设我们有一组配对好的 3D 点
现在想要找到一个欧式变换 R R R, t t t,使得
这个问题可以用迭代最近点(Iterative Closest Point, ICP)求解。可以看到3D-3D 位姿估计问题中,并没有出现相机模型,也就是说,仅考虑两组 3D 点之间的变换时,和相机并没有关系。因此,在激光 SLAM 中也会碰到 ICP,不过由于激光数据特征不够丰富,我们无从知道两个点集之间的匹配关系,只能认为距离最近的两个点为同一个,所以这个方法称为迭代最近点。而在视觉中,特征点为我们提供了较好的匹配关系,所以整个问题就变得更简单了。在 RGB-D SLAM 中,可以用这种方式估计相机位姿。下文我们用 ICP 指代匹配好的两组点间运动估计问题。
和 PnP 类似, ICP 的求解也分为两种方式:利用线性代数的求解(主要是 SVD),以及利用非线性优化方式的求解(类似于 Bundle Adjustment)。下面分别来介绍它们。
2. SVD方法
根据前面描述的 ICP 问题,我们定义第 i i i 对点的误差项: e i = p i − ( R p i ’ + t ) e_i=p_i-(Rp_i^’ + t) ei=pi−(Rpi’+t) 构建最小二乘问题,求使误差平方和达到极小的 R R R 和 t t t :
接下来,来推导它的求解方法。
首先,定义两组点的质心:
随后,在误差函数中,我们作如下的处理: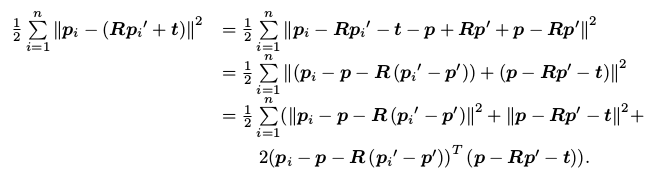
注意到交叉项部分中, ( p i − p − R ( p i ′ − p ′ ) ) (p_i − p − R (p_i^′ − p^′ )) (pi−p−R(pi′−p′))在求和之后是为零的,因此优化目标函数可以简化为:
仔细观察左右两项,我们发现左边只和旋转矩阵 R 相关,而右边既有 R 也有 t,但只和质心相关。只要我们获得了 R,令第二项为零就能得到 t。于是,ICP 可以分为以下三个步骤求解:
- 计算两组点的质心位置 p p p和 p ′ p^′ p′ ,然后计算每个点的去质心坐标: q i = p i − p q_i = p_i-p qi=pi−p q i ′ = p i ′ − p ′ q_i' = p_i'-p' qi′=pi′−p′
- 根据以下优化问题计算旋转矩阵: R ∗ = a r g m i n 1 2 ∑ i = 1 n ∣ ∣ q i − R q i ′ ∣ ∣ 2 R^* = arg min\frac{1}{2}\sum_{i=1}^{n}\mid\mid{q_i-Rq_i'}\mid\mid^2 R∗=argmin21i=1∑n∣∣qi−Rqi′∣∣2
- 根据第二步的 R R R,计算 t t t: t ∗ = p − R p ′ t^* = p-Rp' t∗=p−Rp′
我们看到,只要求出了两组点之间的旋转,平移量是非常容易得到的。所以我们重点关注 R 的计算。展开关于 R 的误差项,得:
注意到第一项和 R 无关,第二项由于 R T R = I,亦与 R 无关。因此,实际上优化目标函数变为:
接下来,我们介绍怎样通过 SVD 解出上述问题中最优的 R,为了解 R,先定义矩阵:
W W W是一个 3 × 3 的矩阵,对 W W W 进行 SVD 分解,得:
其中, Σ Σ Σ 为奇异值组成的对角矩阵,对角线元素从大到小排列,而 U U U 和 V V V 为正交矩阵。当 W W W 满秩时, R R R 为: R = U V T R=UV^T R=UVT
解得 R R R 后,便可求出 t t t.
3.非线性优化方法
求解 ICP 的另一种方式是使用非线性优化,以迭代的方式去找最优值。该方法和前面讲述的 PnP 非常相似。以李代数表达位姿时,目标函数可以写成:
单个误差项关于位姿导数已经在前面推导过了,使用李代数扰动模型即可:
于是,在非线性优化中只需不断迭代,我们就能找到极小值。而且,可以证明 , ICP问题存在唯一解或无穷多解的情况。在唯一解的情况下,只要我们能找到极小值解,那么这个极小值就是全局最优值——因此不会遇到局部极小而非全局最小的情况。这也意味着ICP 求解可以任意选定初始值。这是已经匹配点时求解 ICP 的一大好处。
需要说明的是,我们这里讲的 ICP,是指已经由图像特征给定了匹配的情况下,进行位姿估计的问题。在匹配已知的情况下,这个最小二乘问题实际上具有解析解 ,所以并没有必要进行迭代优化。ICP 的研究者们往往更加关心匹配未知的情况。不过,在RGB-D SLAM 中,由于一个像素的深度数据可能测量不到,所以我们可以混合着使用 PnP和 ICP 优化:对于深度已知的特征点,用建模它们的 3D-3D 误差;对于深度未知的特征点,则建模 3D-2D 的重投影误差。于是,可以将所有的误差放在同一个问题中考虑,使得求解更加方便。




























还没有评论,来说两句吧...