机器人——ROS程序设计学习笔记(chapter7)
书籍名称:《Learning ROS for RoboticsProgramming - Second Edition》Chapter7
参考链接:https://www.cnblogs.com/jinee/p/5047021.html
- 一定要记住它使用的是右手坐标系:
x正方向朝左, y正方向向内, z轴正方向朝上 - 构建树结构, 即写link和joint
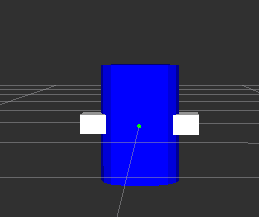
1.几何模型
<?xml version ="1.0"?><robot name = "text1"><!--body--><link name = "base_link"><visual><geometry><cylinder length = "0.6" radius = "0.2"/><!--圆柱体 长度0.6 半径0.2--></geometry><material name = "blue"><color rgba = "0 0 0.8 1"/></material></visual></link><!--right leg--><link name = "right_leg"><visual><geometry><box size = "0.6 .2 .1"/><!--六面体长宽高分别为0.6 0.2 0.1--></geometry><material name = "white"><color rgba = "1 1 1 1"/></material></visual></link><joint name = "base_to_right_leg" type = "fixed"><parent link = "base_link"/><child link = "right_leg"/></joint></robot>
2.调整位置,添加另一条腿
<!--right leg--><link name = "right_leg"><visual><geometry><box size = "0.6 .2 .1"/></geometry><material name = "white"><color rgba = "1 1 1 1"/></material><origin rpy = "0 1.5705 0" xyz = "0 0 -0.3"/></visual></link><joint name = "base_to_right_leg" type = "fixed"><parent link = "base_link"/><child link = "right_leg"/><origin xyz = "0.22 0 0.25"></joint><!--left leg--><link name = "left_leg"><visual><geometry><box size = "0.6 .2 .1"/></geometry><material name = "white"><color rgba = "1 1 1 1"/></material><origin rpy = "0 1.5705 0" xyz = "-0.22 0 -0.05"/></visual></link><joint name = "base_to_left_leg" type = "fixed"><parent link = "base_link"/><child link = "left_leg"/><origin xyz = "-0.22 0 0.25"></joint>
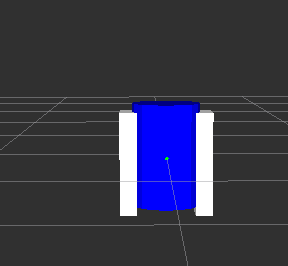
每个link的参考坐标系都在它的底部,并与关节的参考坐标系正交,为了添加尺寸,需要指定偏移从一个link到它的关节的子link, 这通过添加origin到每个节点解决。
origin表示的是关节相对于父关节的距离和旋转, xyz和rpy(1.5705:90°)
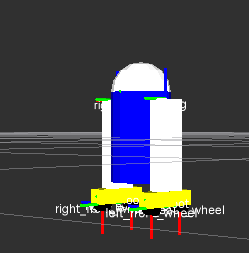
3.添加剩余部位
调整一下,全部代码:
<?xml version ="1.0"?><robot name = "text1"><!--body--><link name = "base_link"><visual><geometry><cylinder length = "0.6" radius = "0.2"/></geometry><material name = "blue"><color rgba = "0 0 0.8 1"/></material></visual></link><!--right leg--><link name = "right_leg"><visual><geometry><box size = "0.6 .2 .1"/></geometry><material name = "white"><color rgba = "1 1 1 1"/></material><origin rpy = "0 1.5705 0" xyz = "0 0 -0.3"/></visual></link><joint name = "base_to_right_leg" type = "fixed"><parent link = "base_link"/><child link = "right_leg"/><origin xyz = "0.22 0 .25"/></joint><!--left leg--><link name = "left_leg"><visual><geometry><box size = "0.6 .2 .1"/></geometry><material name = "white"><color rgba = "1 1 1 1"/></material><origin rpy = "0 1.5705 0" xyz = "0 0 -0.3"/></visual></link><joint name = "base_to_left_leg" type = "fixed"><parent link = "base_link"/><child link = "left_leg"/><origin xyz = "-0.22 0 .25"/></joint><!--head--><link name = "head"><visual><geometry><sphere radius = "0.2"/></geometry><material name = "white"/></visual></link><joint name="base_to_head" type="fixed"><parent link="base_link"/><child link="head"/><origin xyz="0 0 0.3"/></joint><!--right foot--><link name = "right_foot"><visual><geometry><box size = "0.1 .4 .1"/></geometry><material name = "yellow"><color rgba = "1 1 0 1"/></material></visual></link><joint name = "leg_to_right_foot" type = "fixed"><parent link = "right_leg"/><child link = "right_foot"/><origin xyz = "0 0 -0.65"/></joint><!--left foot--><link name = "left_foot"><visual><geometry><box size = "0.1 .4 .1"/></geometry><material name = "yellow"><color rgba = "1 1 0 1"/></material></visual></link><joint name = "leg_to_left_foot" type = "fixed"><parent link = "left_leg"/><child link = "left_foot"/><origin xyz = "0 0 -0.65"/></joint><!--right foot front wheel--><link name = "right_front_wheel"><visual><geometry><cylinder length= "0.08" radius = "0.05"/></geometry><material name = "black"><color rgba = "0 0 0 1"/></material></visual></link><joint name = "right_foot_to_front_wheel" type = "fixed"><parent link ="right_foot"/><child link = "right_front_wheel"/><origin xyz = "0 0.14 -0.05" rpy = "0 1.5705 0"/></joint><!--right foot back wheel--><link name = "right_back_wheel"><visual><geometry><cylinder length= "0.08" radius = "0.05"/></geometry><material name = "black"><color rgba = "0 0 0 1"/></material></visual></link><joint name = "right_foot_to_back_wheel" type = "fixed"><parent link ="right_foot"/><child link = "right_back_wheel"/><origin xyz = "0 -0.14 -0.05" rpy = "0 1.5705 0"/></joint><!--left foot front wheel--><link name = "left_front_wheel"><visual><geometry><cylinder length= "0.08" radius = "0.05"/></geometry><material name = "black"><color rgba = "0 0 0 1"/></material></visual></link><joint name = "left_foot_to_front_wheel" type = "fixed"><parent link ="left_foot"/><child link = "left_front_wheel"/><origin xyz = "0 0.14 -0.05" rpy = "0 1.5705 0"/></joint><!--left foot back wheel--><link name = "left_back_wheel"><visual><geometry><cylinder length= "0.08" radius = "0.05"/></geometry><material name = "black"><color rgba = "0 0 0 1"/></material></visual></link><joint name = "left_foot_to_back_wheel" type = "fixed"><parent link ="left_foot"/><child link = "left_back_wheel"/><origin xyz = "0 -0.14 -0.05" rpy = "0 1.5705 0"/></joint></robot>
4.添加碰撞collision
碰撞只要将link包裹住就可以了
<!--body--><link name = "base_link"><visual><geometry><cylinder length = "0.6" radius = "0.2"/></geometry><material name = "blue"><color rgba = "0 0 0.8 1"/></material></visual><collision><geometry><cylinder length = "0.6" radius = "0.2"/></geometry></collision></link>
5.xacro
使用宏,简化代码,顺便添加inertial
这里使用了三个宏:代码如下(中间代码省略)
<?xml version ="1.0"?><robot name = "text1" xmlns:xacro="http://www.ros.org/wiki/xacro"><xacro:property name="wheel_length" value="0.08" /><xacro:property name="wheel_radius" value="0.05" /><xacro:macro name="default_inertial" params="mass"><inertial><mass value="${mass}" /><inertia ixx="1.0" ixy="0.0" ixz="0.0"iyy="1.0" iyz="0.0"izz="1.0" /></inertial></xacro:macro>...<!--left foot back wheel--><link name = "left_back_wheel"><visual><geometry><cylinder length= "${wheel_length}" radius = "${wheel_radius}"/></geometry><material name = "black"><color rgba = "0 0 0 1"/></material></visual><collision><geometry><cylinder length= "${wheel_length}" radius = "${wheel_radius}"/></geometry></collision><xacro:default_inertial mass = "1"/></link><joint name = "left_foot_to_back_wheel" type = "continuous"><parent link ="left_foot"/><child link = "left_back_wheel"/><axis xyz = "0 0 1"/><origin xyz = "0 -0.14 -0.05" rpy = "0 1.5705 0"/></joint></robot>
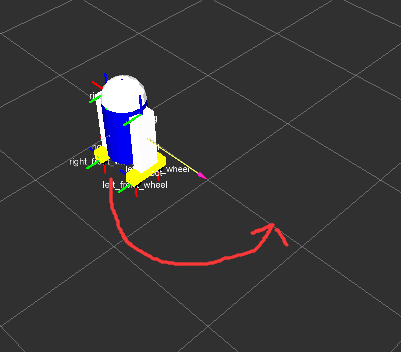
6.让机器人动起来
让机器人走圆
cpp如下:
#include <string>#include <ros/ros.h>#include <sensor_msgs/JointState.h>#include <tf/transform_broadcaster.h>int main(int argc, char** argv) {ros::init(argc, argv, "state_publisher_text");ros::NodeHandle n;ros::Publisher joint_pub = n.advertise<sensor_msgs::JointState>("joint_states", 1);tf::TransformBroadcaster broadcaster;ros::Rate loop_rate(30);const double degree = M_PI/180;// robot statedouble inc= 0.005,wheel_1_inc= -0.05,wheel_2_inc= -0.05,wheel_3_inc= -0.07,wheel_4_inc= -0.07; //轮子向后转,机器人向前移动,所以这里是负double angle= 0,base_head = 0,wheel_1= 0,wheel_2= 0,wheel_3= 0,wheel_4= 0;// message declarationsgeometry_msgs::TransformStamped odom_trans;sensor_msgs::JointState joint_state;odom_trans.header.frame_id = "odom";odom_trans.child_frame_id = "base_link";while (ros::ok()) {//update joint_statejoint_state.header.stamp = ros::Time::now();joint_state.name.resize(9);joint_state.position.resize(9);joint_state.name[0] ="base_to_head";joint_state.position[0] = base_head;joint_state.name[1] ="base_to_right_leg";joint_state.position[1] = 0;joint_state.name[2] ="base_to_left_leg";joint_state.position[2] = 0;joint_state.name[3] ="right_leg_to_right_foot";joint_state.position[3] = 0;joint_state.name[4] ="left_leg_to_left_foot";joint_state.position[4] = 0;joint_state.name[5] ="right_foot_to_front_wheel";joint_state.position[5] = wheel_1;joint_state.name[6] ="right_foot_to_back_wheel";joint_state.position[6] = wheel_2;joint_state.name[7] ="left_foot_to_front_wheel";joint_state.position[7] = wheel_3;joint_state.name[8] ="left_foot_to_back_wheel";joint_state.position[8] = wheel_4;// update transform// (moving in a circle with radius)//改变二维平面的x,y的坐标,z轴垂直于xOy,故z的坐标是0odom_trans.header.stamp = ros::Time::now();odom_trans.transform.translation.x = cos(angle);odom_trans.transform.translation.y = sin(angle);odom_trans.transform.translation.z = 0.0;odom_trans.transform.rotation = tf::createQuaternionMsgFromYaw(angle);//send the joint state and transformjoint_pub.publish(joint_state);broadcaster.sendTransform(odom_trans);// Create new robot statebase_head += inc;if(base_head< -2.0||base_head> 2.0) base_head *= -1;wheel_1 += wheel_1_inc;if(wheel_1< -2.0||wheel_1> 2.0) wheel_1 *= -1;wheel_2 += wheel_2_inc;if(wheel_2< -2.0||wheel_2> 2.0) wheel_2 *= -1;wheel_3 += wheel_3_inc;if(wheel_3< -2.0||wheel_3> 2.0) wheel_3 *= -1;wheel_4 += wheel_4_inc;if(wheel_4< -2.0||wheel_4> 2.0) wheel_4 *= -1;angle += degree/4;// This will adjust as needed per iterationloop_rate.sleep();}return 0;}
Chapter7部分错误与解决方法:
P275:
问题:执行以下命令时,出现错误提示:
$ check_urdf robot1.urdfError: Error document empty.at line 72 in /build/buildd/urdfdom 0.2.10+dfsg/urdf_parser/src/model.cppERROR: Model Parsing the xml failed
解决:在.urdf前添加路径
check_urdf /home/<user_name>/ROS/catkin_ws/src/learning_urdf/urdf/robot1.urdf
P276:
问题:执行$ roslaunch …命令后没有3D模型
解决:在<?xml version=”1.0”?>代码段,在倒数第二行添加,注意结尾是 urdf.rviz,否则会报错。
<node name="rviz" pkg="rviz" type="rviz" args="-d $(find urdf_tutorial)/urdf.rviz" />
P277:
问题:在urdf中添加package:
<mesh filename = "package://pr2_description/meshes/gripper_v0/l_finger.dae"/>
编译时一直报错,提示没有找到资源
解决:我将含有.dae的文件夹(meshes)放在”robot1_description“(功能包)中,相对路径改为
<mesh filename = "package://robot1_description/meshes/gripper_v0/l_finger.dae"/>
加载成功。另外urdf中不能含有中文





























")




还没有评论,来说两句吧...