HOG特征可视化
可视化说明
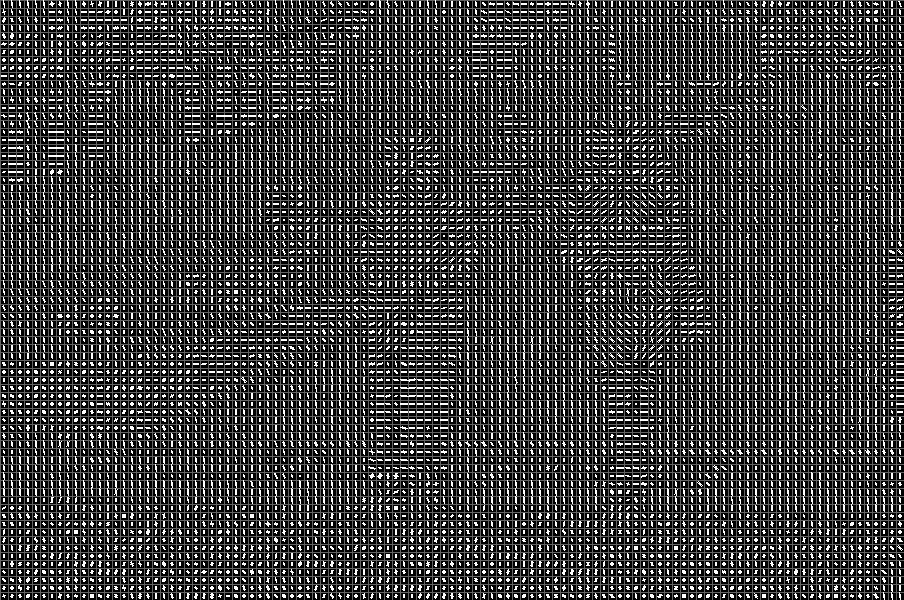
在之前博客HOG原理及OpenCV实现中,我们解释了HOG算法的原理。最终提取到的特征就是一串向量,其实我们并不知道它具体是什么样子,也不知道它到底是不是能体现目标区域与非目标区域的差异。为了解决这个问题,我们需要对HOG特征做可视化处理。
HOG特征首先去计算每个像素的梯度,然后建立滑动窗口,在滑动窗中建立滑动块,在块中建立等分的单元(cell)。我们仔细思考下这个过程,一个块在滑动时,每次包含的单元是不同的,但是对于一个单元而言,它是不随块滑动而改变的。这就意味着,如果块尺寸,块步长,单元尺寸确定了,一个窗口中的单元数目与它们中分别包含的像素就确定了。HOG的可视化就是利用这一点,它可视化的东西就是一个单元内的bin投票结果。
为了让下面的过程变得更直观,我们将整个图像作为一个检测窗来使用,也就是说不存在滑动窗的概念。
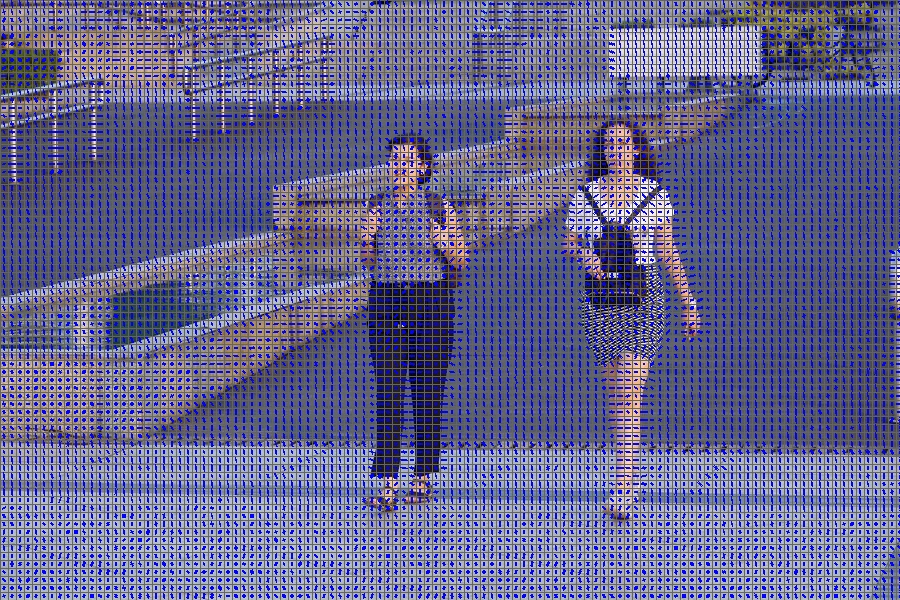
特别要注意,这应该是HOG最容易产生异常的地方。下面的图片本来是个900×600 900 × 600 的尺寸,但是我对它做了缩放,调整成904×600 904 × 600 。这是为了让904的范围内可以滑出整数个块,因为此时HOG在使用默认参数,即块尺寸16×16 16 × 16 ,块步长8×8 8 × 8 。
900−168=110.5 900 − 16 8 = 110.5
904−168=111 904 − 16 8 = 111
代码实现
#include <iostream>#include <opencv2/core/core.hpp>#include <opencv2/highgui/highgui.hpp>#include <opencv2/opencv.hpp>using namespace cv;using namespace std;// HOGDescriptor visual_imagealizer// adapted for arbitrary size of feature sets and training imagesMat get_hogdescriptor_visual_image(Mat& origImg,vector<float>& descriptorValues,Size winSize,Size cellSize,int scaleFactor,double viz_factor){Mat visual_image;resize(origImg, visual_image, Size(origImg.cols*scaleFactor, origImg.rows*scaleFactor));int gradientBinSize = 9;// dividing 180° into 9 bins, how large (in rad) is one bin?float radRangeForOneBin = 3.14/(float)gradientBinSize;// prepare data structure: 9 orientation / gradient strenghts for each cellint cells_in_x_dir = winSize.width / cellSize.width;int cells_in_y_dir = winSize.height / cellSize.height;int totalnrofcells = cells_in_x_dir * cells_in_y_dir;float*** gradientStrengths = new float**[cells_in_y_dir];int** cellUpdateCounter = new int*[cells_in_y_dir];for (int y=0; y<cells_in_y_dir; y++){gradientStrengths[y] = new float*[cells_in_x_dir];cellUpdateCounter[y] = new int[cells_in_x_dir];for (int x=0; x<cells_in_x_dir; x++){gradientStrengths[y][x] = new float[gradientBinSize];cellUpdateCounter[y][x] = 0;for (int bin=0; bin<gradientBinSize; bin++)gradientStrengths[y][x][bin] = 0.0;}}// nr of blocks = nr of cells - 1// since there is a new block on each cell (overlapping blocks!) but the last oneint blocks_in_x_dir = cells_in_x_dir - 1;int blocks_in_y_dir = cells_in_y_dir - 1;// compute gradient strengths per cellint descriptorDataIdx = 0;int cellx = 0;int celly = 0;for (int blockx=0; blockx<blocks_in_x_dir; blockx++){for (int blocky=0; blocky<blocks_in_y_dir; blocky++){// 4 cells per block ...for (int cellNr=0; cellNr<4; cellNr++){// compute corresponding cell nrint cellx = blockx;int celly = blocky;if (cellNr==1) celly++;if (cellNr==2) cellx++;if (cellNr==3){cellx++;celly++;}for (int bin=0; bin<gradientBinSize; bin++){float gradientStrength = descriptorValues[ descriptorDataIdx ];descriptorDataIdx++;gradientStrengths[celly][cellx][bin] += gradientStrength;} // for (all bins)// note: overlapping blocks lead to multiple updates of this sum!// we therefore keep track how often a cell was updated,// to compute average gradient strengthscellUpdateCounter[celly][cellx]++;} // for (all cells)} // for (all block x pos)} // for (all block y pos)// compute average gradient strengthsfor (int celly=0; celly<cells_in_y_dir; celly++){for (int cellx=0; cellx<cells_in_x_dir; cellx++){float NrUpdatesForThisCell = (float)cellUpdateCounter[celly][cellx];// compute average gradient strenghts for each gradient bin directionfor (int bin=0; bin<gradientBinSize; bin++){gradientStrengths[celly][cellx][bin] /= NrUpdatesForThisCell;}}}cout << "descriptorDataIdx = " << descriptorDataIdx << endl;// draw cellsfor (int celly=0; celly<cells_in_y_dir; celly++){for (int cellx=0; cellx<cells_in_x_dir; cellx++){int drawX = cellx * cellSize.width;int drawY = celly * cellSize.height;int mx = drawX + cellSize.width/2;int my = drawY + cellSize.height/2;rectangle(visual_image,Point(drawX*scaleFactor,drawY*scaleFactor),Point((drawX+cellSize.width)*scaleFactor,(drawY+cellSize.height)*scaleFactor),CV_RGB(100,100,100),1);// draw in each cell all 9 gradient strengthsfor (int bin=0; bin<gradientBinSize; bin++){float currentGradStrength = gradientStrengths[celly][cellx][bin];// no line to draw?if (currentGradStrength==0)continue;float currRad = bin * radRangeForOneBin + radRangeForOneBin/2;float dirVecX = cos( currRad );float dirVecY = sin( currRad );float maxVecLen = cellSize.width/2;float scale = viz_factor; // just a visual_imagealization scale,// to see the lines better// compute line coordinatesfloat x1 = mx - dirVecX * currentGradStrength * maxVecLen * scale;float y1 = my - dirVecY * currentGradStrength * maxVecLen * scale;float x2 = mx + dirVecX * currentGradStrength * maxVecLen * scale;float y2 = my + dirVecY * currentGradStrength * maxVecLen * scale;// draw gradient visual_imagealizationline(visual_image,Point(x1*scaleFactor,y1*scaleFactor),Point(x2*scaleFactor,y2*scaleFactor),CV_RGB(0,0,255),1);} // for (all bins)} // for (cellx)} // for (celly)// don't forget to free memory allocated by helper data structures!for (int y=0; y<cells_in_y_dir; y++){for (int x=0; x<cells_in_x_dir; x++){delete[] gradientStrengths[y][x];}delete[] gradientStrengths[y];delete[] cellUpdateCounter[y];}delete[] gradientStrengths;delete[] cellUpdateCounter;return visual_image;}int main(){HOGDescriptor hog;hog.winSize=Size(904,600);vector<float> des;Mat src = imread("timg.jpg");Mat dst ;resize(src,dst,Size(904,600));imshow("src",src);hog.compute(dst,des);cout<<des.size()<<endl;Mat background = Mat::zeros(Size(904,600),CV_8UC1);Mat background_hog = get_hogdescriptor_visual_image(background,des,hog.winSize,hog.cellSize,1,2.0);imshow("HOG特征1",background_hog);imwrite("特征可视化1.jpg",background_hog);Mat src_hog = get_hogdescriptor_visual_image(src,des,hog.winSize,hog.cellSize,1,2.0);imshow("HOG特征2",src_hog);imwrite("特征可视化2.jpg",src_hog);waitKey();return 0;}



































还没有评论,来说两句吧...