算法-排序算法总结
冒泡排序
朴素冒泡排序
反复扫描待排序序列,在扫描的过程中顺次比较相邻的两个元素的大小,若逆序就交换位置。第一趟,从第一个数据开始,比较相邻的两个数据,(以升序为例)总是把大的数交换到后面,得到一个最大数据在末尾;然后进行第二趟,只扫描前n-1个元素,得到次大的放在倒数第二位。以此类推,最后得到升序序列。
当然也可以从最后一个数开始向前扫描,此时要把较小的数换到前面,得到一个最小的数在最前面;然后进行第二趟,只扫描后n-1个元素,得到次小的放在第二位。以此类推,得到升序序列。
无论是找最大还是找最小,冒泡排序都是一个数从底部逐位移到顶部,就像气泡一样,这也就是冒泡排序的名字由来。
void BubbleSort_simple(int array[], int length){int temp; //保存临时数据(数据交换时使用)for(int i = 0; i < length-1; i++)//设置需要扫描的趟数{for(int j = 0; j < length - i - 1; j++) //遍历,比相邻两个数据的大小{if(array[j] > array[j+1]){temp = array[j+1];array[j+1] = array[j];array[j] = temp;}}}}
改进冒泡排序
对于朴素冒泡排序算法,永远在进行从从n-1到1扫描过程,哪怕中间某次的时候,顺序就已经排好了(不再有交换),所以可以根据这点对冒泡排序作出改进,的如果在某次扫描过程中,发现没有交换,说明已经排好序列,直接终止扫描。所以最多进行n-1趟扫描,最少只需要1趟。
void BubbleSort_Improve(int array[], int length){int temp; //保存临时数据(数据交换时使用)bool flag = true; //设置标记,记录此趟排序是否发生交换for(int i = 0; i < length-1&&flag; i++)//设置需要扫描的趟数{flag = false;for(int j = 0; j < length - i - 1; j++) //遍历,比相邻两个数据的大小{if(array[j] > array[j+1]){temp = array[j+1];array[j+1] = array[j];array[j] = temp;flag = true;}}}}
稳定性与复杂度分析
- 时间复杂度:
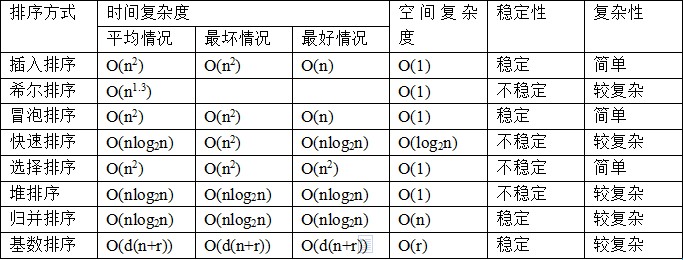
对于朴素冒泡排序算法,没有最好与最差情况的区别,时间复杂度都是 O ( n 2 ) O(n^2) O(n2),对于改进冒泡排序算法,最好的情况是本来有序,此时时间复杂度为 O ( n ) O(n) O(n),最差的情况是逆序,此时时间复杂度为 O ( n 2 ) O(n^2) O(n2)。 - 空间复杂度:
冒泡排序只需要一个临时位置做交换数据,所以空间复杂度 O ( 1 ) O(1) O(1)。 - 稳定性:
稳定
简单选择排序
冒泡排序存在大量的逐位交换操作,这是因为冒泡排序每次逐位比较后,只要满足条件就会发生交换,最后把小的数换到最前。那么一定需要逐位交换吗?能不能先知道某个值最终要放到哪里,然后一次换好?这就是简单选择排序要做的事。
简单选择排序算法就是为了解决频繁交换的问题(虽然这对时间复杂度计算没有影响,但是交换操作实际上在影响着效率)。
选择排序,或者叫简单选择排序(因为堆排序也是一种选择排序),简单选择排序有两个索引,一个是要把最小的值交换到的位置i,一个是找到的最小值位置min,其中i是随着遍历逐步加1的,而每一次的过程中都用i初始化min,并遍历i后的所有个位置逐个与min比较,最终从中找到min的位置后与i交换,i++后重复上述过程,直到遍历结束。
void SelectSort(int array[], int length){int min; //保存目标元素的索引int temp; //临时变量(数据交换时候使用)for(int i = 0; i < length; i++)//对数组中的每一个数进行遍历{min = i; //最小值位置等于它本身for(int j = i+1; j < length; j++)//选择出目前最小元素的索引{if(array[min] > array[j])min = j;}if(min != i){temp = array[i];array[i] = array[min];array[min] = temp;}}}
稳定性与复杂度分析
- 时间复杂度:
简单选择排序为了解决频繁交换问题,相比于(改进冒泡排序)在时间复杂度上没有改进,其实反而更差一些,因为简单选择排序在时间复杂度上没有最好与最坏的区别,都是 O ( n 2 ) O(n^2) O(n2),但是比较好的一点是,即便是最差的情况,简单选择排序的交换次数也只有 n − 1 n-1 n−1次。 - 空间复杂度:
O ( 1 ) O(1) O(1) - 稳定性:
不稳定
直接插入排序
这里的插入排序指的是直接插入排序算法,基本思想就是认为前i-1个数的顺序已经排好,将第i个值插入到前i-1个中的适当位置。所以i是从数组中第二个数开始一直到最后,每次插入前都保存好array[i]的值,并对前i-1个数的位置做出调整,最后将array[i]插入到合适的位置。
void InsertSort(int array[],int length){int temp, insert; //temp保存插入值,insert记录与插入值比较的索引for(int i = 1;i < length;i++){temp = array[i]; //记录下需要插入的值,防止向后移位时,值被覆盖insert = i-1;while(insert >= 0 && array[insert] > temp ){array[insert+1] = array[insert];insert = insert - 1;}array[insert+1] = temp;}}
稳定性与复杂度分析
- 时间复杂度:
最好的情况(本身有序),时间复杂度 O ( n ) O(n) O(n);最差的情况(本身逆序),时间复杂度 O ( n 2 ) O(n^2) O(n2),平均时间复杂度 O ( n 2 ) O(n^2) O(n2)。 - 空间复杂度:
O ( 1 ) O(1) O(1) - 稳定性:
稳定
希尔排序
希尔排序是第一个突破排序时间复杂度 O ( n 2 ) O(n^2) O(n2)的算法,又称缩小增量排序法。基本思想是使用跃进的方式,把待排序序列分成若干较小的子序列,然后逐个使用直接插入排序法排序,最后再对一个较为有序的序列进行一次排序,主要是为了减少移动的次数,提高效率。原理应该就是从无序到渐渐有序,要比直接从无序到有序移动的次数会少一些。
希尔排序比较难理解的地方也是它的跃进式方式,在最外层的循环(do-while)中,是在改变跃进的步长,最后一次的跃进步长一定为1,也就是两两交换。第二层循环(第一个for)实现以某一次的step遍历所有数,而for之内的操作其实就是一个直接插入排序。
- 希尔排序中的直接插入操作,是在间隔一个阶跃进行子序列操作,13-20行是一个直接插入排序,只是1换成了step。
希尔排序的最后一次do(step =1),一定是退化成直接插入排序,但是这个时候,数列是相对有序的状态。
void ShellSort(int array[], int length)
{int insert,temp; //temp保存临时数据(数据交换时使用)int step=length; //设置增量do{step = step/3;//做直接插入排序 将1换成stepfor( int i = step; i < length; i++){temp = array[i];insert = i-step;while(insert>=0&& array[insert] > temp){array[insert + step] = array[insert];insert-=step}array[insert + step] = temp;}}while (step>1);
}
稳定性与复杂度分析
- 时间复杂度:
最好的情况(本身有序),时间复杂度 O ( n 1.3 ) O(n^{1.3}) O(n1.3);最差的情况(本身逆序),时间复杂度 O ( n 2 ) O(n^2) O(n2),平均时间复杂度 ( n 1.5 ) (n^{1.5}) (n1.5)。 - 空间复杂度:
O ( 1 ) O(1) O(1) - 稳定性:
不稳定
快速排序
快速排序是一个递归的过程,递归的部分一般称为Partition,即在一个序列中选取一个数字n,把序列中小于等于n的数字放在n的左边,大于n的数字放在n 的右边,即完成了一次Partition。其具体的实现为:
比如一个数列arr为:{4,7,8,9,5,6,1,3,2},那么我们可以直接把arr[0]位置的数作为分割数,即n=4,那么下面的工作就是如何把数列中小于等于4的数放在4的左边,大于等于4的数放在4的右边。首先找到右侧第一个小于等于4的数,与4所在的位置交换:
2 7 8 9 5 6 1 3 4
找到左侧第一个大于等于4的数,与4交换:
2 4 8 9 5 6 1 3 7
找到右侧第一个小于等于4的数,与4交换:
2 3 8 9 5 6 1 4 7
找到左侧第一个大于等于4的数,与4交换:
2 3 4 9 5 6 1 8 7
一直重复上述过程,直到右侧大于等于4的数与左侧小于等于4的数是一个数(一个位置),也就是4本身所在的位置,就完成了一次Partition:
2 3 1 9 5 6 4 8 7
2 3 1 4 5 6 9 8 7
2 3 1 4 5 6 9 8 7
2 3 1 4 5 6 9 8 7
以上就是快速排序算法的基础组成,而快排就是不断递归Partition的过程。
//Partition过程int Partition(int array[],int low,int high){int pv = array[low];while(low<high){//low和pv对应的索引是相同的,先判断高位while((low<high)&&(array[high]>=pv))high--;swap(array,high,low);while((low<high)&&array[low]<=pv)low++;swap(array,low,high);}return low;}//递归调用部分void QSort(int array[],int low,int high){if (low>=high)return;int pvIndex = Partition(array,low,high);QSort(array,low,pvIndex-1);QSort(array,pvIndex+1,high);}void QuickSort(int array[],int length){QSort(array,0,length-1);}
稳定性与复杂度分析
- 时间复杂度:
最好的情况(本身有序),时间复杂度 O ( n l o g n ) O(nlogn) O(nlogn);最差的情况(本身逆序),时间复杂度 O ( n 2 ) O(n^2) O(n2),平均时间复杂度 ( n l o g n ) (nlogn) (nlogn)。 - 空间复杂度:
O ( n l o g n ) O(nlogn) O(nlogn) - 稳定性:
不稳定
归并排序
归并排序是建立在二路归并和分治法的基础上的一个高效排序算法,将已有序的子序列合并,得到完全有序的序列;即先使每个子序列有序,再使子序列段间有序。若将两个有序表合并成一个有序表,称为二路归并。
将待排序序列R[0…n-1]看成是n个长度为1的有序序列,将相邻的有序表成对归并,得到n/2个长度为2的有序表;将这些有序序列再次归并,得到n/4个长度为4的有序序列;如此反复进行下去,最后得到一个长度为n的有序序列。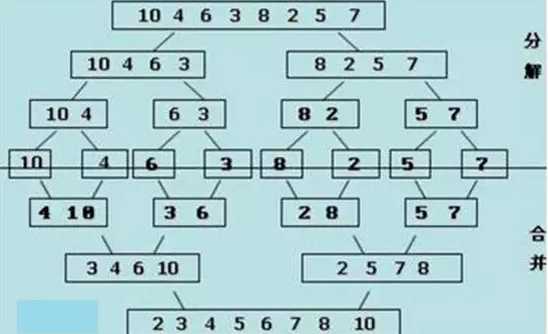
所以就像快速排序的Partition功能一样,归并排序也有一个基础的组成部分,就是合并的过程,我们可以将它称为Merge,其思路为:比较二个数列的第一个数,谁小就先取谁,取了后就在对应数列中删除这个数。然后再进行比较,如果有数列为空,那直接将另一个数列的数据依次取出即可。
void Merge(int array[],int left,int mid,int right){int lstart=left;int rstart = mid+1;int index = 0;int *temp = new int[right-left+1];while (lstart<=mid&&rstart<=right){if(array[lstart]<=array[rstart])temp[index++]=array[lstart++];elsetemp[index++]=array[rstart++];}while (lstart<=mid){temp[index++]=array[lstart++];}while (rstart<=right){temp[index++]=array[rstart++];}for(int i = 0; i < index; i++)array[left+i] = temp[i];delete[] temp;temp = nullptr;}void MSort(int array[],int left,int right){if(left == right) return;int mid = (left+right)/2;MSort(array,left,mid);MSort(array,mid+1,right);Merge(array,left,mid,right);}void MergeSort(int array[],int length){MSort(array,0,length-1);}
稳定性与复杂度分析
- 时间复杂度:
最好的情况(本身有序),时间复杂度 O ( n l o g n ) O(nlogn) O(nlogn);最差的情况(本身逆序),时间复杂度 O ( n l o g n ) O(nlogn) O(nlogn),平均时间复杂度 ( n l o g n ) (nlogn) (nlogn)。 - 空间复杂度:
在所有的常见排序算法中,归并排序的空间复杂度最高,因为他需要一个和待排序数列相同长度的空间去做拆分和合并,所以空间复杂度为: O ( n ) O(n) O(n) - 稳定性:
稳定
归并排序也是快排,堆排序,归并排序三种算法中唯一稳定的一个。
堆排序
堆排序是指利用堆积树(堆)这种数据结构所设计的一种排序算法,它是选择排序的一种。所以在理解堆排序之前,要了解堆的概念:
堆分为大根堆和小根堆,是完全二叉树。
若设二叉树的深度为h,除第 h 层外,其它各层 (1~h-1) 的结点数都达到最大个数,第 h 层所有的结点都连续集中在最左边,这就是完全二叉树。完全二叉树度为1的点只有1个或0个
大根堆的要求是每个节点的值都不大于其父节点的值,即A[PARENT[i]] >= A[i]。所以根据大根堆的要求可知,最大的值一定在堆顶。与最大堆对应的就是最小堆了,最小堆的要求是每一个节点的值都不小于其父结点的值。堆一般用数组的形式实现,下面就是最大堆与最小堆的存储结构: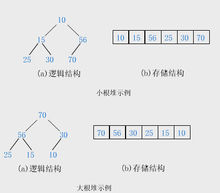
可以看到,i结点的父结点下标就为(i – 1) / 2(/符号是取整符号,不是除法!!不是除法!!)。它的左右子结点下标分别为2 * i + 1和2 * i + 2。如第0个结点左右子结点下标分别为1和2。比如最大数组中,i=3位置的值为25,那么其父结点为i=1位置,在最大堆中也就是56;i=3结点的左右孩子是i=7和i-8,显然没有。
那么清楚了最大堆与其顺序存储形式后,就可以看下堆排序算法了(假设使用最大堆),那么首先将无序的数组构建成一个最大堆的形式,此时堆顶的元素值一定是最大的,随后移除该值,重新调整成最大堆,重复移除与调整的过程,直到只剩下最后一个结点。
void HeapAdjust(int array[],int parent,int length){int temp =array[parent];for(int child = parent*2+1;child<length;child = child*2+1){if(child+1<length&&array[child]<array[child+1])child++;if(temp>=array[child])break;array[parent] = array[child];parent = child;}array[parent] = temp;}void HeapSort(int array[],int length){int i;for(i=length/2-1;i>=0;i--)HeapAdjust(array,i,length-1);for (i = length-1;i>0;i--){swap(array,0,i);HeapAdjust(array,0,i);}}void HeapAdjust(int array[], int start, int end){//建立父节点指标和子节点指标int dad = start;int son = dad * 2 + 1;while (son <= end) //若子节点指标在范围内才做比较{if (son + 1 <= end && array[son] < array[son + 1]) //先比较两个子节点大小,选择最大的son++;if (array[dad] > array[son]) //如果父节点大於子节点代表调整完毕,直接跳出函数return;else //否则交换父子内容再继续子节点和孙节点比较{swap(array,dad, son);dad = son;son = dad * 2 + 1;}}}void HeapSort(int array[], int length){//初始化,i从最后一个父节点开始调整,下标为lenght/2 -1for (int i = length/ 2 - 1; i >= 0; i--)HeapAdjust(array, i, length- 1);//调整数组从i到最后//先将第一个元素和已经排好的元素前一位做交换,再从新调整(刚调整的元素之前的元素),直到排序完毕for (int i = length- 1; i > 0; i--){swap(array,0,i);HeapAdjust(array, 0, i - 1);//调整数组从开始到交换好的前一个位置}}
稳定性与复杂度分析
- 时间复杂度:
最好的情况(本身有序),时间复杂度 O ( n l o g n ) O(nlogn) O(nlogn);最差的情况(本身逆序),时间复杂度 O ( n l o g n ) O(nlogn) O(nlogn),平均时间复杂度 O ( n l o g n ) O(nlogn) O(nlogn)。 - 空间复杂度:
O ( 1 ) O(1) O(1) - 稳定性:
不稳定
总结
所有排序算法中用的最多的是堆排序,快速排序与归并排序,在这三种算法中:
如果从空间复杂度来考虑的话,首选堆排序,其次是快速排序,最后是归并排序。
如果从稳定性考虑,选择归并排序(稳定)。
此外,还有一种说法,如果待排序列表基本有序,那么选择直接插入排序。
在以上的7中排序算法中,也可以按照主要操作进行分类,可以分为4类:
基于交换:冒泡排序,快速排序
基于选择:简单选择排序,堆排序
基于插入:直接插入排序,希尔排序
基于归并:归并排序
在最后,不知道大家有没有发现一个问题,堆排序与快排的空间复杂度,平均时间复杂度与最好情况下时间复杂度都一样,但是最差情况下时间复杂度堆排序要更胜一筹,那么为毛快排更好呢?直接贴出解答地址吧,我也是从这看的:数学之美番外篇:快排为什么那样快

























")








还没有评论,来说两句吧...