




























相关阅读
相关 URDF 机器人建模(后面用 xacro模型)
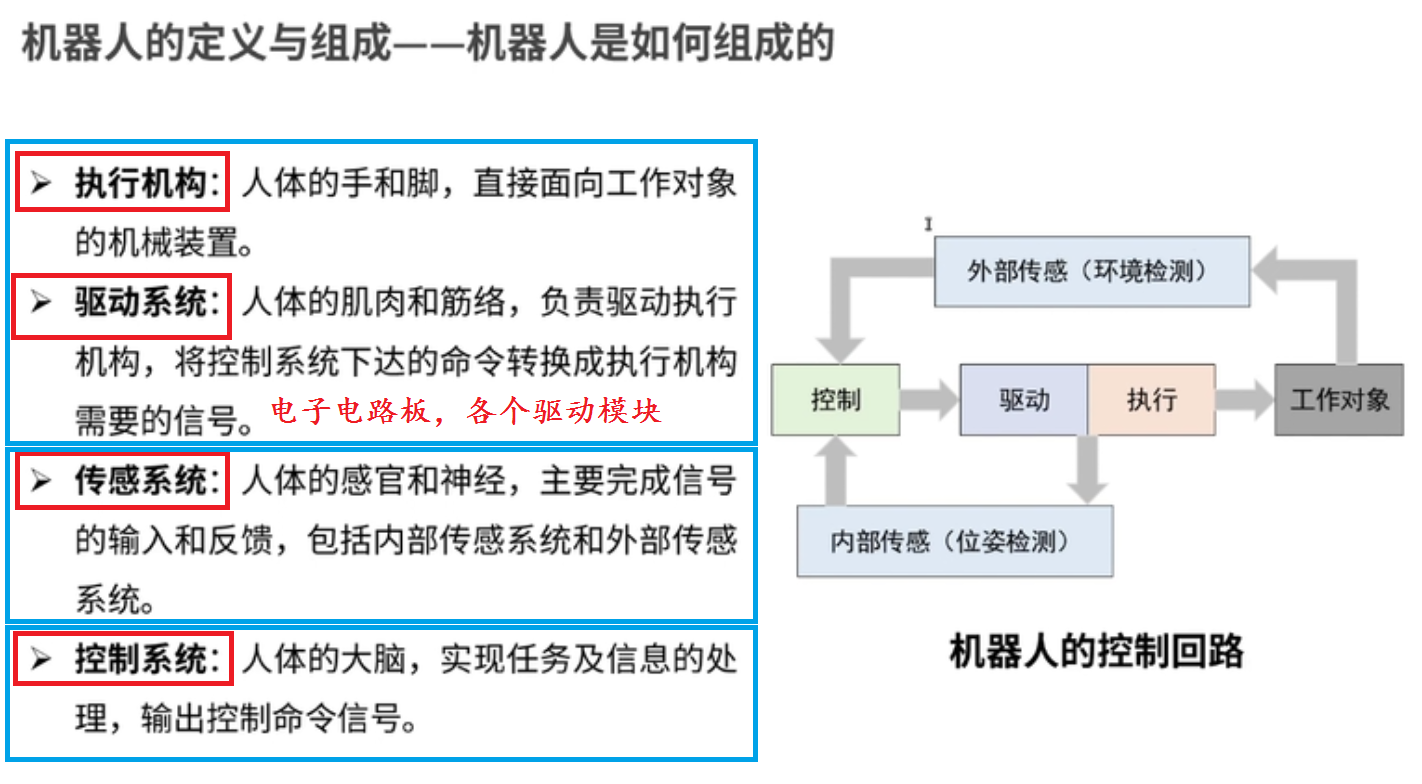
1、机器人的组成 ![在这里插入图片描述][watermark_type_ZmFuZ3poZW5naGVpdGk_shadow_10_text_aHR0cHM6Ly9ib
相关 ROS urdf xacro 建模 差速轮模型
目录 URDF 1.什么是URDF 2.link与joint标签 3.robot标签 4.建模实例 xacro 1.什么是xacro 2.如何使用xacr
相关 URDF与xacro
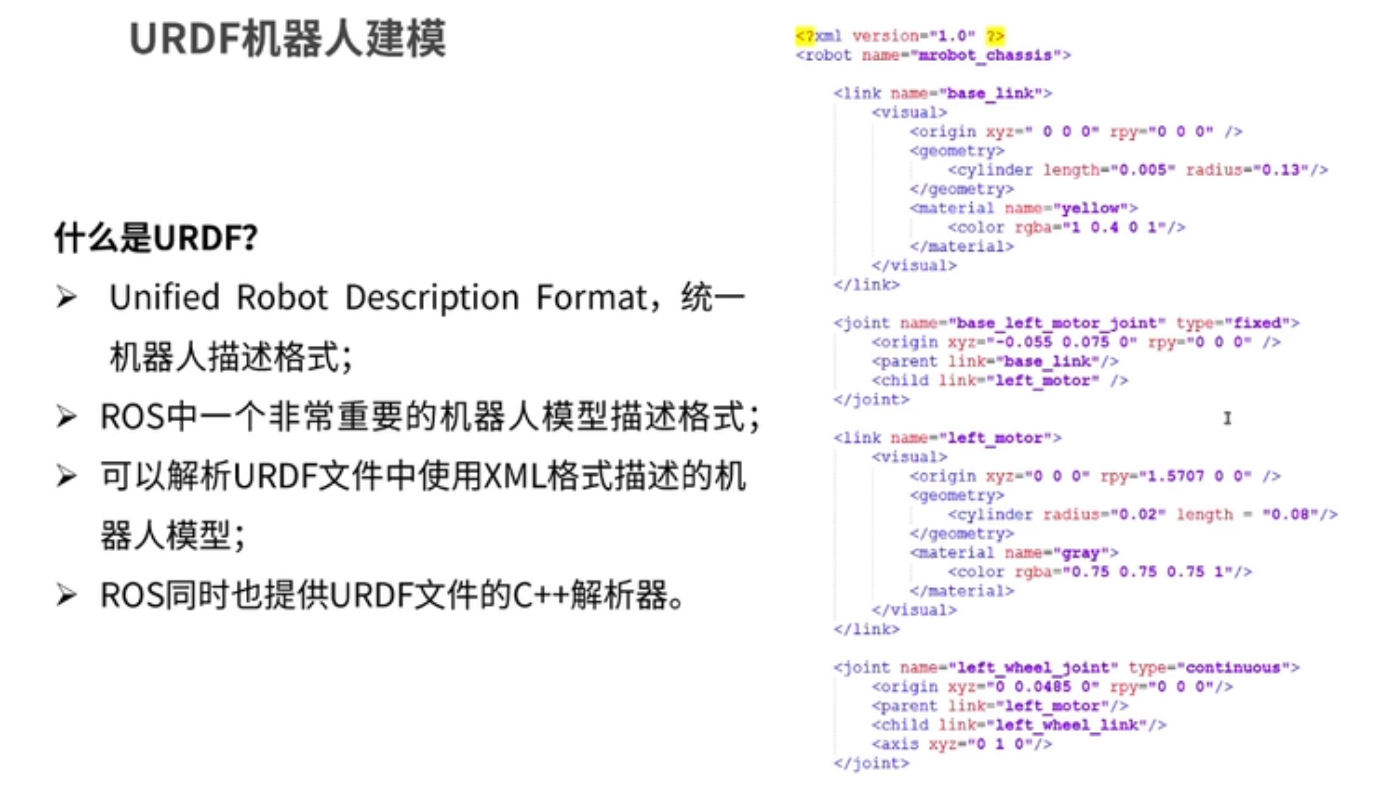
什么是URDF[¶][Link 1] 全称为 Unified Robot Description Format ,翻译为中文为 统一机器人描述性格式 那么这里我们可以确
相关 机器人描述格式-URDF详解
URDF格式在ROS中是一个非常重要的机器人模型描述格式,URDF采用各种标签描述具体的机器人模型 1 机器人名称描述 <robot name="mrobot\_chass
相关 [ROS] ArbotiX控制+xacro机器人仿真模型设计 实现初级建模与车体控制
1.环境准备 需要:ros系统,ArbotiX功能包 假设读者已经安装好ROS系统(百度有很多安装教程),下面安装arbotix功能包已经ros依赖库 > $ gi
相关 ROS URDF添加传感器模型
ROS URDF添加传感器模型 添加传感器模型 添加摄像头 对应的模型文件是camera.xacro, 内容如下 <?xml version="1.
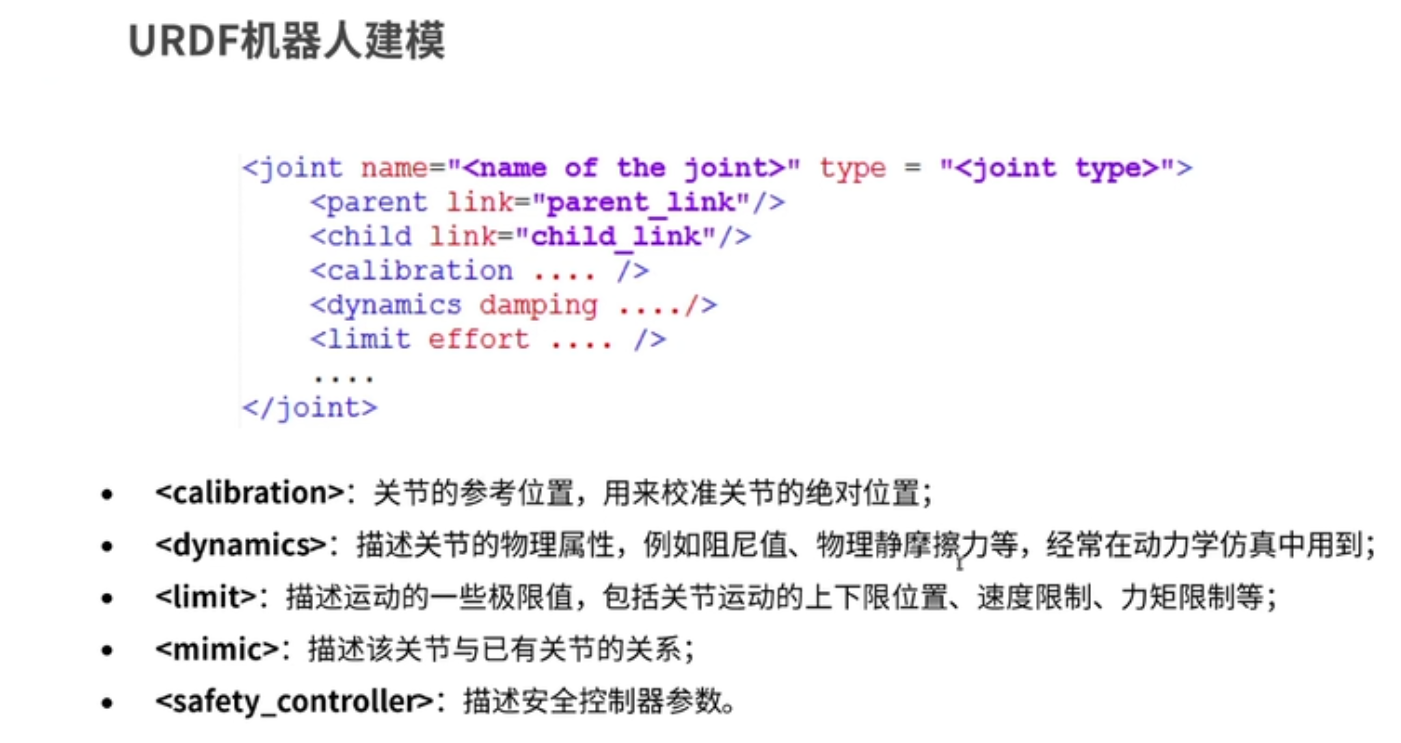
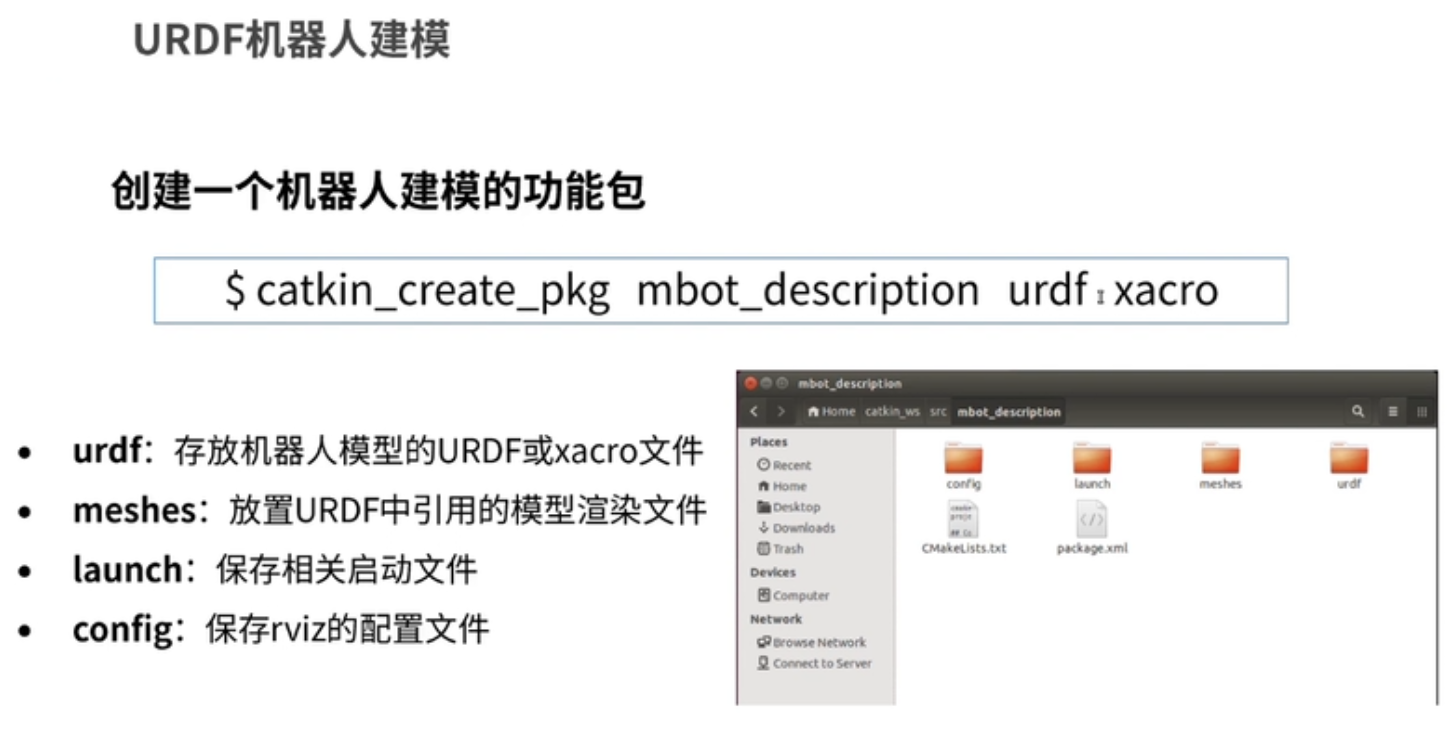
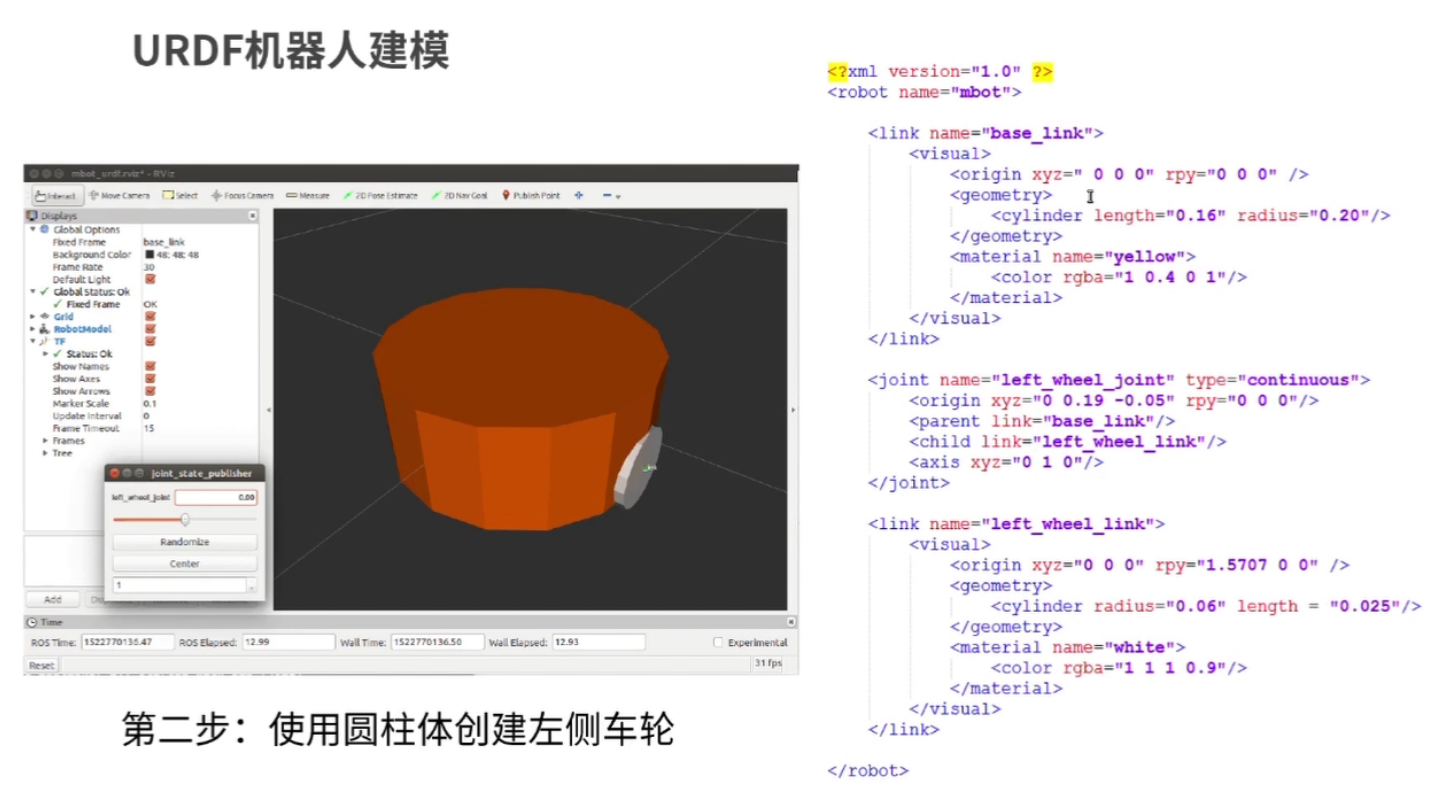
相关 ROS URDF机器人建模
ROS URDF机器人建模 创建URDF模型 (1)创建机器人描述功能包 catkin_create_pkg mrobot_description urd
相关 数学建模规划模型(转)
线性规划的定义: 求一组变量的值,在满足一组约束条件下,求得目标函数的最优解。 根据这个定义,就可以确定线性规划模型的基本结构。 (1)变量 变量又叫未知数,它是实际系
相关 blender建模常用建模快捷键
编辑物体 M2选取 M2+SHIFT选取多个 A全选 B+M1矩阵选择 C+M1笔刷选择 CTRL+M1套索选择 CTRL+SHIFT+M1取消套索选择 ALT

littleVGL LVGL 控件学习 Arc 弧形控件")

——遗传算法的基本实现技术")




还没有评论,来说两句吧...