无人驾驶2:卡尔曼滤波行人状态估计
案例场景
传感器能够直接观测到某行人的速度Vx,Vy,用卡尔曼滤波估算该行人的状态(包含速度和位置)
相关变量约定如下:
行人状态 x = ( p x , p y , v x , v y ) T x = (p_x,p_y,v_x, v_y)^T x=(px,py,vx,vy)T
P: 行人不确定性,协方差矩阵
F: 状态转移矩阵
Q: 过程噪声协方差矩阵
K: 卡尔曼滤波增益
H: 观测矩阵
R: 观测噪声协方差矩阵
step0:随机产生一批测量数据,包含二维速度测量值
import numpy as np%matplotlib inlineimport matplotlib.pyplot as pltfrom scipy.stats import normm = 200 #measurementsvx = 20vy = 10mx = np.array(vx + np.random.randn(m))my = np.array(vy + np.random.randn(m))measurements = np.vstack((mx,my))print(measurements.shape)print('Standard Deviation of Acceleration Measurements=%0.2f'%np.std(mx))print('You assumed %0.2f in R.'%R[0,0])
执行结果:
(2, 200)
Standard Deviation of Acceleration Measurements=1.04
You assumed 0.09 in R.
fig = plt.figure(figsize=(16,5))plt.step(range(m), mx, label='$\dot x $')plt.step(range(m), my, label='$\dot y $')plt.ylabel(r'Velocity $m/s$')plt.title('Measurements')plt.legend(loc='best',prop={ 'size':18})plt.savefig('measurements.png')

step1:初始化行人状态
包括x,y方向的位置和速度,及行人的不确定性,测量间隔时间dt
x: 行人状态初始值, 因未知,所以全设置为0
P: 行人不确定性初始值,不确定性很高
x = np.matrix([[0.0,0.0,0.0,0.0]]).Tprint(x,x.shape)P=np.diag([1000.0,1000.0,1000.0,1000.0])print(P,P.shape)
执行结果:
[[0.]
[0.]
[0.]
[0.]] (4, 1)
[[1000. 0. 0. 0.]
[ 0. 1000. 0. 0.]
[ 0. 0. 1000. 0.]
[ 0. 0. 0. 1000.]] (4, 4)
step2:设计过程模型和过程噪声协方差矩阵
设计卡尔曼滤波器时,必须定义两个线性函数,如下图:
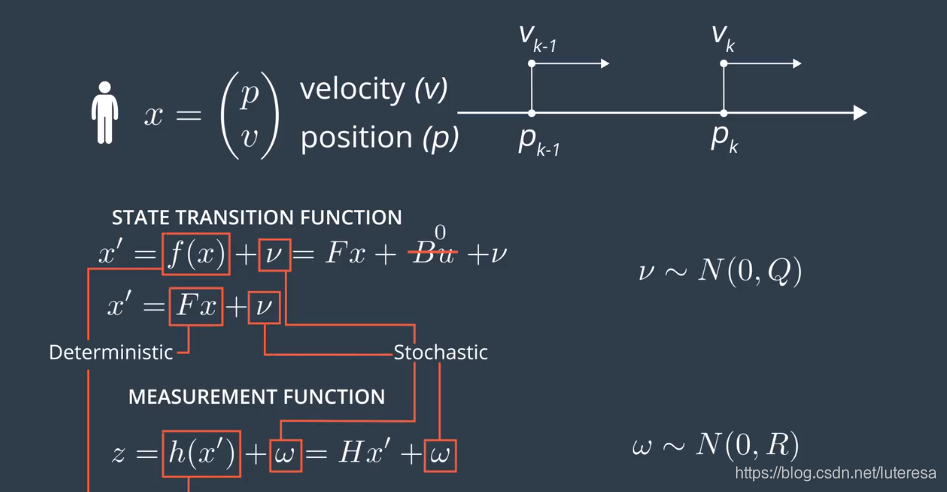
状态转移函数F:该函数对从时间k-1到时间k的状态变换进行建模;
测量函数H: 该函数对测量值的计算方式,以及测量值和预测值状态x的关联进行建模;
这些函数的第一部分F,H是模型中的确定性部分,尾项噪声v和噪声w表述的时随机部分,影响预测和测量更新步骤的随机误差;
(1)假设运动为恒速模型,即行人速度不变,过程模型可以描述如下
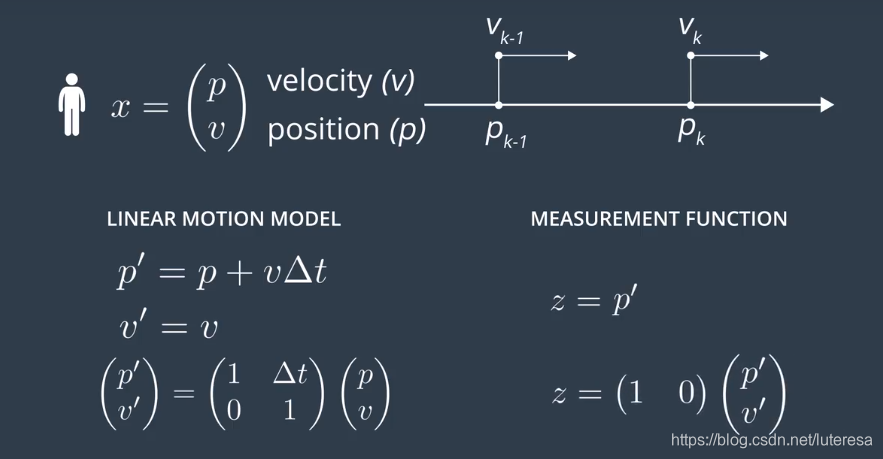
即运动模型为:
x k + 1 = [ 1.0 0. d t 0. 1.0 0. 0. d t 0 0 1 0 0 0 0 1 ] ∗ [ p x p y v x v y ] x_k+1 = \left[\begin{matrix} 1.0&0.&dt&0.\\ 1.0&0.&0.&dt\\ 0&0&1&0 \\ 0&0&0&1 \\ \end{matrix} \right]*\left[\begin{matrix} p_x\\ p_y\\ v_x \\ v_y \\ \end{matrix} \right] xk+1=⎣⎢⎢⎡1.01.0000.0.00dt0.100.dt01⎦⎥⎥⎤∗⎣⎢⎢⎡pxpyvxvy⎦⎥⎥⎤
(2)实际上行人运动过程不一定为恒速,总会有内因(行人自己加速度,无人车内部的加速度控制)和外因(风速,路面光滑程度)等影响;
内因用u表示,是行人或无人车内部控制向量,B是输入控制矩阵;
Bu表示行人由于自身内部动力,引起状态变化;
v表示由于风速,路滑等外因引起的状态变化量,是个随机变量,称为过程噪声;
对一个行人连续观察两次,获得初始速度和最终速度,根据根据动力学公式,可以推导出当前时刻状态和上一时刻状态的函数关系,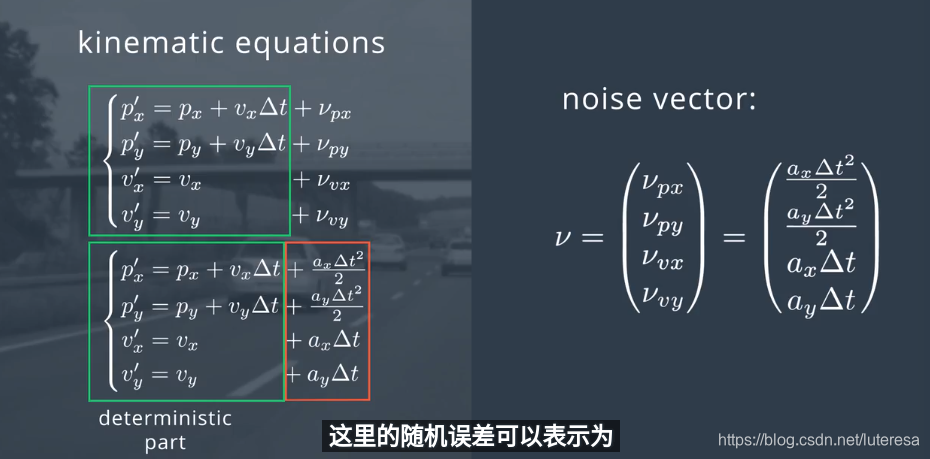
由于观测物体(行人)自身加速度无法准确和预估,应用中常设置Bu=0, 就用随机变量v(均值为0的高斯噪声)作为随机噪声;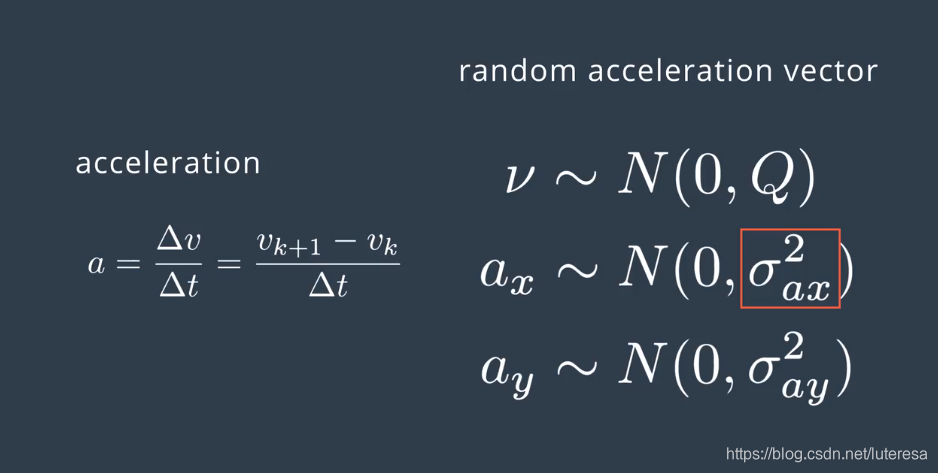
由于加速度未知,可以把加速度加到误差分量中,添加v噪声(加速度和过程噪声都用v来表征)后的过程模型为: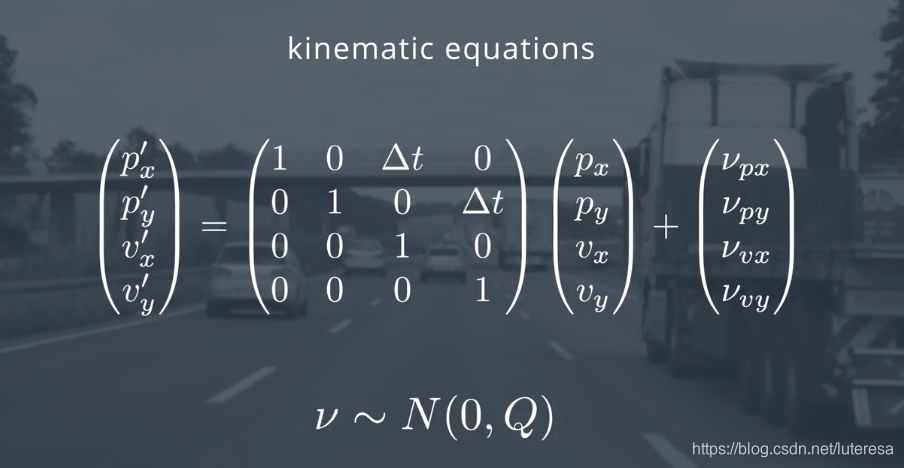
矩阵表示为:
x k + 1 = [ 1.0 0. d t 0. 1.0 0. 0. d t 0 0 1 0 0 0 0 1 ] ∗ [ p x p y v x v y ] + [ 1 2 a x d t 2 1 2 a y d t 2 a x d t a y d t ] x_k+1 = \left[\begin{matrix} 1.0&0.&dt&0.\\ 1.0&0.&0.&dt\\ 0&0&1&0 \\ 0&0&0&1 \\ \end{matrix} \right]*\left[\begin{matrix} p_x\\ p_y\\ v_x \\ v_y \\ \end{matrix} \right] + \left[\begin{matrix} \frac{1}{2}a_xdt^2\\ \frac{1}{2}a_ydt^2\\ a_xdt \\ a_ydt \\ \end{matrix} \right] xk+1=⎣⎢⎢⎡1.01.0000.0.00dt0.100.dt01⎦⎥⎥⎤∗⎣⎢⎢⎡pxpyvxvy⎦⎥⎥⎤+⎣⎢⎢⎡21axdt221aydt2axdtaydt⎦⎥⎥⎤
将v分解为两个分量:一个4x2的矩阵G(不包含随机变量)和一个2x1的矩阵a(包含随机加速度分量)。
根据误差向量,现在可以定义新的协方差矩阵Q:协方差矩阵定位为误差向量的期望;
因为G不包含随机变量,可以放在期望外面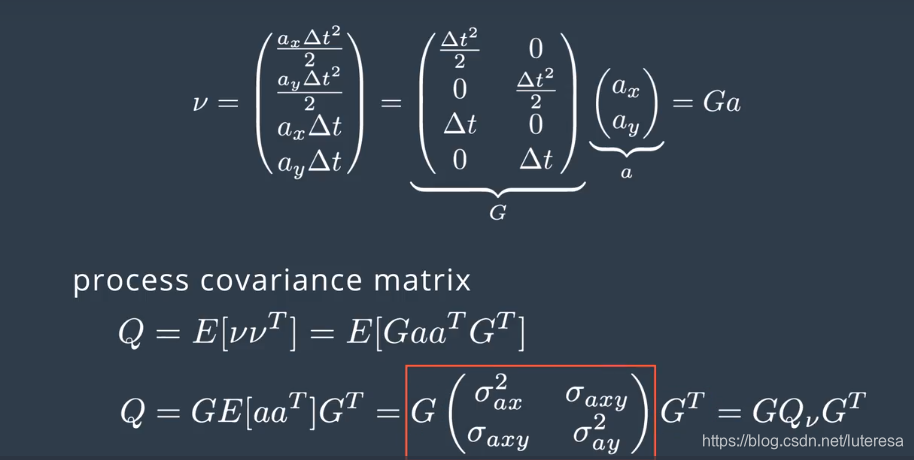
假 定 a x 和 a y 是 无 关 连 的 噪 声 , 那 么 σ z x y = 0 假定a_x和a_y是无关连的噪声,那么\sigma_{zxy}=0 假定ax和ay是无关连的噪声,那么σzxy=0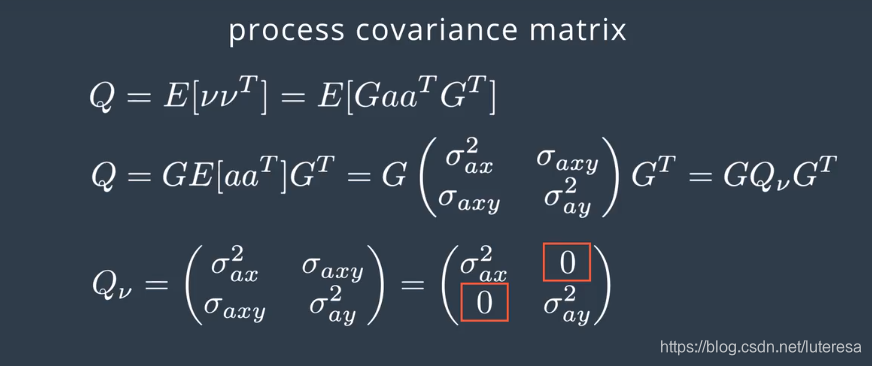
合并回原矩阵得到如下过程协方差矩阵
噪声Q本质上是一个均值为0的高斯分布v~N(0,Q), 卡尔曼公式2就变成:
p k ′ = a p k a T + Q p_k^{‘} = ap_ka^T + Q pk′=apkaT+Q
转移矩阵表示为:
F = [ 1.0 0. d t 0. 1.0 0. 0. d t 0 0 1 0 0 0 0 1 ] F= \left[\begin{matrix} 1.0&0.&dt&0.\\ 1.0&0.&0.&dt\\ 0&0&1&0 \\ 0&0&0&1 \\ \end{matrix} \right] F=⎣⎢⎢⎡1.01.0000.0.00dt0.100.dt01⎦⎥⎥⎤
dt = 0.1 # Time step between Filters stepsF = np.matrix([[1.0,0.0,dt,0.0],[0.0,1.0,0.0,dt],[0.0,0.0,1.0,0.0],[0.0,0.0,0.0,1.0]])print(F,F.shape)
执行结果:
[[1. 0. 0.1 0. ]
[0. 1. 0. 0.1]
[0. 0. 1. 0. ]
[0. 0. 0. 1. ]] (4, 4)
‘’‘sv = 0.5G = np.matrix([[0.5*dt**2],[0.5*dt**2],[dt],[dt]])Q = G*G.T*sv*2from sympy import Symbol, Matrixfrom sympy.interactive import printingprinting.init_printing()dts = Symbol('dt')’‘’noise_ax=0.5noise_ay=0.5dt_2 = dt*dt;dt_3 = dt_2 *dt;dt_4 = dt_3*dt;Q = np.matrix([[0.25*dt_4*noise_ax,0,0.5*dt_3*noise_ax,0],[0, 0.25*dt_4*noise_ay,0, 0.25*dt_3*noise_ay],[dt_3/2*noise_ax, 0, dt_2*noise_ax, 0],[0, dt_3/2*noise_ay, 0, dt_2*noise_ay]])
执行结果:
[[0.09 0. ]
[0. 0.09]] (2, 2)
step3: 设计测量模型,观测噪声
(1)使用传感器可以直接测量行人的速度Vx, Vy,
Z = [ v x v y ] Z= \left[\begin{matrix} v_x\\ v_y\\ \end{matrix} \right] Z=[vxvy]
(2) 测量矩阵可以表示为:
H = [ 0 0 1 0 0 0 0 1 ] H= \left[\begin{matrix} 0&0&1&0\\ 0&0&0&1 \\ \end{matrix} \right] H=[00001001]
(3)测量噪声的协方差矩阵为:
R = [ σ v x 2 0 0 σ v y 2 ] R= \left[\begin{matrix} \sigma_{v_x}^2&0\\ 0&\sigma_{v_y}^2 \\ \end{matrix} \right] R=[σvx200σvy2]
σ v x 2 , σ v y 2 \sigma_{v_x}^2, \sigma_{v_y}^2 σvx2,σvy2描述了传感器的测量有“多差”,是传感器固有性质,一般有厂商提供
H = np.matrix([[0.0,0.0,1.0,0.0],[0.0,0.0,0.0,1.0]])print(H, H.shape)ra = 0.09 #厂商提供R = np.matrix([[ra,0.0],[0.0,ra]])print(R,R.shape)
执行结果:
[[0. 0. 1. 0.]
[0. 0. 0. 1.]] (2, 4)
[[0.09 0. ]
[0. 0.09]] (2, 2)
I = np.eye(4)print(I, I.shape)
执行结果:
[[1. 0. 0. 0.]
[0. 1. 0. 0.]
[0. 0. 1. 0.]
[0. 0. 0. 1.]] (4, 4)
一些过程值,用于结果显示
xt = []yt = []dxt = []dyt = []Zx = []Zy = []Px = []Py = []Pdx = []Pdy = []Rdx = []Rdy = []Kx = []Ky = []Kdx =[]Kdy = []def save_states(x,Z,P,R,K):xt.append(float(x[0]))yt.append(float(x[1]))dxt.append(float(x[2]))dyt.append(float(x[3]))Zx.append(float(Z[0]))Zy.append(float(Z[1]))Px.append(float(P[0,0]))Py.append(float(P[1,1]))Pdx.append(float(P[2,2]))Pdy.append(float(P[3,3]))Rdx.append(float(R[0,0]))Rdy.append(float(R[1,1]))Kx.append(float(K[0,0]))Ky.append(float(K[1,0]))Kdx.append(float(K[2,0]))Kdy.append(float(K[3,0]))
step4: 卡尔曼公式
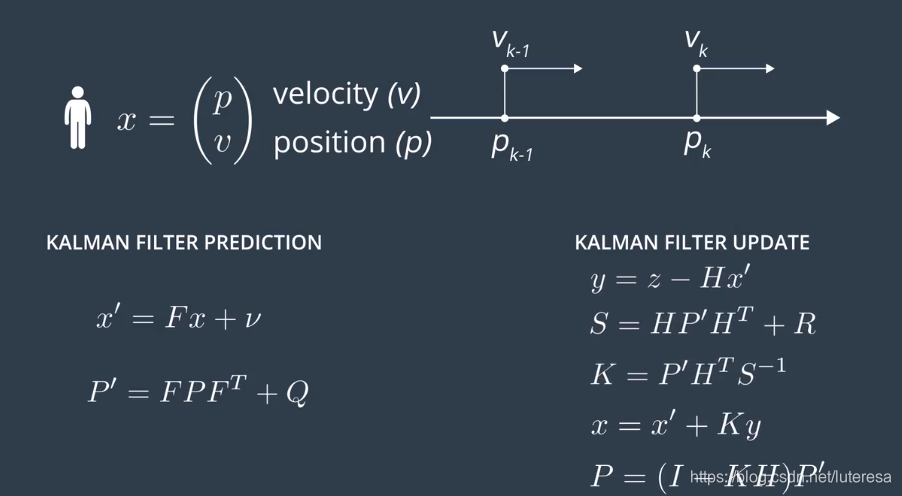
for n in range(len(measurements[0])):#Time Update(Prediction)# ==============================x = F*x #Project the state aheadP = F * P *F.T + Q #Project the error covariance ahead# Measurement Update (Correction)#==============================S = H*P*H.T + RK = (P*H.T)*np.linalg.pinv(S)#Update the estimate via zZ = measurements[:,n].reshape(2,1)y = Z - (H*x)x = x + (K*y)#update the error convarianceP = (I - (K*H))*P#save states (for Plotting)save_states(x,Z,P,R,K)def plot_x():fig = plt.figure(figsize=(16,9))plt.step(range(len(measurements[0])), dxt, label='$estimateVx $')plt.step(range(len(measurements[0])), dyt, label='$estimateVy $')plt.step(range(len(measurements[0])),measurements[0],label='$measurementVx$')plt.step(range(len(measurements[0])),measurements[1],label='$measurementVy$')#plt.axhline(vx, colors='#999999',label = '$trueVx$')#plt.axhline(vy, colors='#999999',label = '$trueVy$')plt.xlabel('Filter Step')plt.title('Estimate (Elements from State Vector $x$)')plt.legend(loc='best',prop={ 'size':11})plt.ylim([0,30])plt.ylabel('Velocity')plot_x()
卡尔曼滤波关于速度的估计结果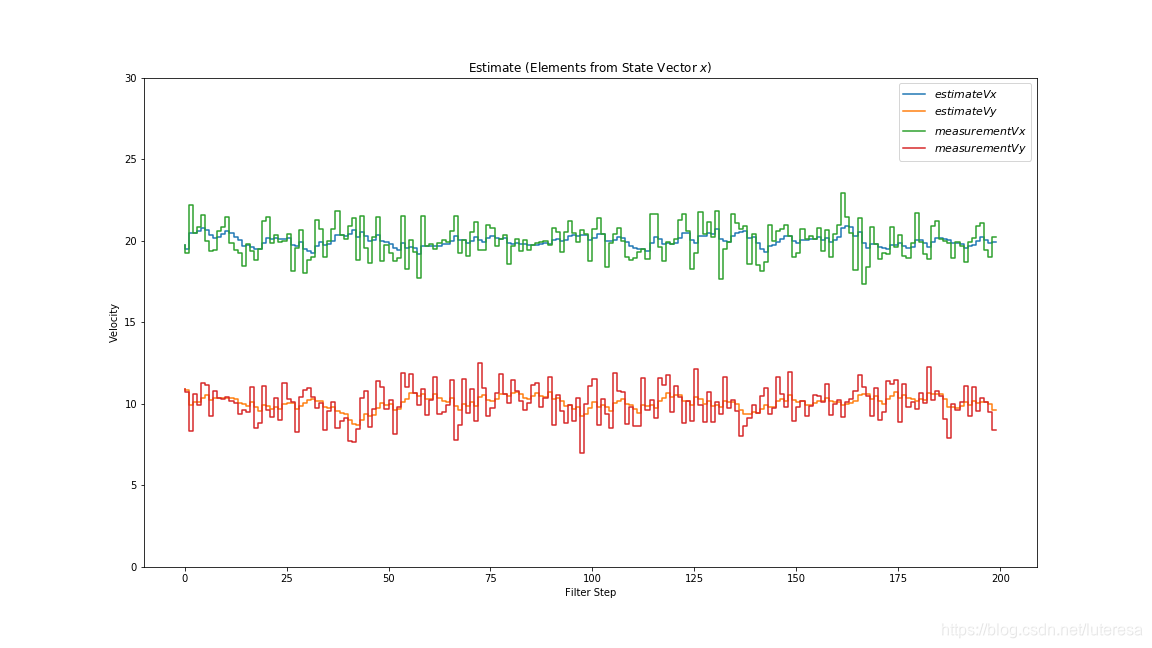
def plot_xy():fig = plt.figure(figsize=(16,9))plt.scatter(xt,yt,s=20,label='State', c = 'k')plt.scatter(xt[0],yt[0],s = 100, label='Start', c = 'g')plt.scatter(xt[-1], yt[-1],s=100,label='Goal', c = 'r')plt.xlabel('X')plt.ylabel('Y')plt.legend('Position')plt.axis('equal')plot_xy()
卡尔曼滤波位置估算结果: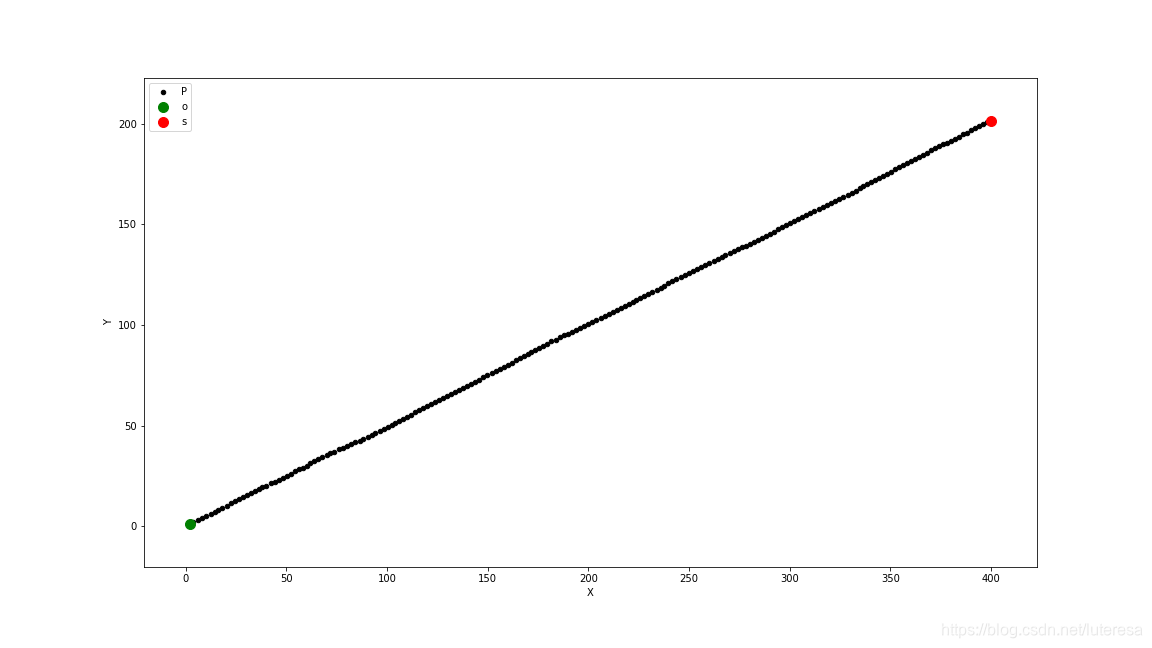

























 —— 一个窗口显示多张图片")








还没有评论,来说两句吧...