深度学习算法优化系列二十二 | 利用TensorRT部署YOLOV3-Tiny INT8量化模型
1. 前言
上一节深度学习算法优化系列二十一 | 在VS2015上利用TensorRT部署YOLOV3-Tiny模型 分享了使用TensorRT在GPU上部署FP32的YOLOV3-Tiny模型,这一节继续分享一下如何部署INT8的YOLOV3-Tiny模型。
2. 确定走哪条路?
和上一节一样,这里仍然是走ONNX->TRT这条路,也就是说我这里的INT8量化是在TensorRT中使用nvonnxparser解析了YOLOV3-Tiny 的ONNX模型之后完成的,似乎这也是比较主流的方法。官方例子中提供了一个MNIST数据集的INT8量化,过程也是先用nvcaffeparser解析Caffe模型然后直接做量化并将原始模型序列化为TRT文件以供后面的图像推理。
所以,我这里走的路就是直接解析ONNX模型->INT8量化->序列化为TRT文件->完成推理。
3. 准备校准集
如果你懂TensorRT的量化原理,就没必要看这一节了,如果不懂也没关系后面我会单独写一篇文章来尝试解释一下。首先宏观的说一下,TensorRT对一个模型进行全INT8量化包含权重和激活值两大部分,对于权重采用的是直接非饱和量化,也就是说直接统计权重的最大值和最小值就可以完成量化。而对于激活值的量化,则需要以下步骤:
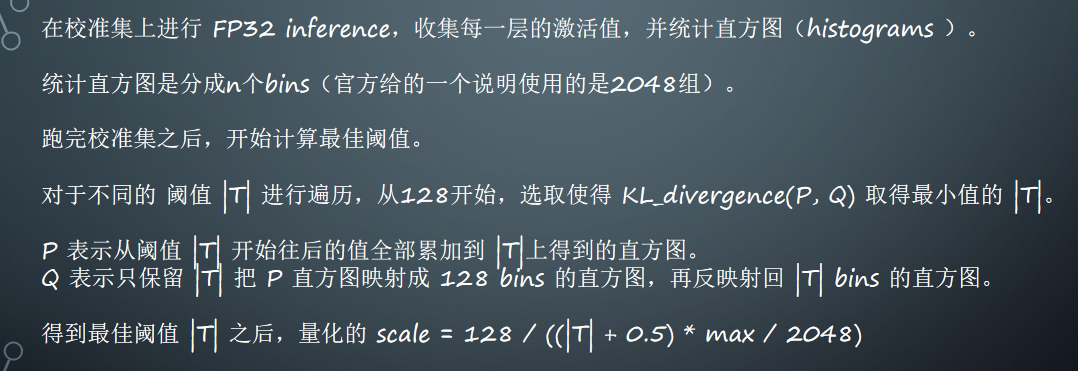
可以看到在量化激活值的时候需要利用校准集进行FP32的推理并收集每一层的激活值并统计直方图。因此,在INT8量化之前我们首先需要准备一下校准集。这里怎么准备呢?
很简单,你训练YOLOV3-Tiny的验证集抽出一部分就可以了(我这里使用了100张,NVIDIA的PPT里面说需要使用1000张,最好和PPT里面指定的图片数量一致,PPT见附录),然后将图片的路径放到一个*.txt文件里面就可以了,如下图所示:
4. TensorRT INT8量化核心步骤
接着上一次推文的介绍,你已经可以获得YOLOV3-Tiny的FP32的ONNX文件。然后我们只需要写一个新的类int8EntroyCalibrator继承Int8EntropyCalibrator这个类,然后重写一些和数据读取相关的成员函数即可。这样就可以随心所欲的去修改校验数据的读取格式,不用像官方例子那样还必须转成Caffe模型并将数据集制作为指定格式。重载后的代码如下:
namespace nvinfer1 {class int8EntroyCalibrator : public nvinfer1::IInt8EntropyCalibrator {public:int8EntroyCalibrator(const int &bacthSize,const std::string &imgPath,const std::string &calibTablePath);virtual ~int8EntroyCalibrator();int getBatchSize() const override { return batchSize; }bool getBatch(void *bindings[], const char *names[], int nbBindings) override;const void *readCalibrationCache(std::size_t &length) override;void writeCalibrationCache(const void *ptr, std::size_t length) override;private:bool forwardFace;int batchSize;size_t inputCount;size_t imageIndex;std::string calibTablePath;std::vector<std::string> imgPaths;float *batchData{ nullptr };void *deviceInput{ nullptr };bool readCache;std::vector<char> calibrationCache;};int8EntroyCalibrator::int8EntroyCalibrator(const int &bacthSize, const std::string &imgPath,const std::string &calibTablePath) :batchSize(bacthSize), calibTablePath(calibTablePath), imageIndex(0), forwardFace(false) {int inputChannel = 3;int inputH = 416;int inputW = 416;inputCount = bacthSize*inputChannel*inputH*inputW;std::fstream f(imgPath);if (f.is_open()) {std::string temp;while (std::getline(f, temp)) imgPaths.push_back(temp);}int len = imgPaths.size();for (int i = 0; i < len; i++) {cout << imgPaths[i] << endl;}batchData = new float[inputCount];CHECK(cudaMalloc(&deviceInput, inputCount * sizeof(float)));}int8EntroyCalibrator::~int8EntroyCalibrator() {CHECK(cudaFree(deviceInput));if (batchData)delete[] batchData;}bool int8EntroyCalibrator::getBatch(void **bindings, const char **names, int nbBindings) {cout << imageIndex << " " << batchSize << endl;cout << imgPaths.size() << endl;if (imageIndex + batchSize > int(imgPaths.size()))return false;// load batchfloat* ptr = batchData;for (size_t j = imageIndex; j < imageIndex + batchSize; ++j){//cout << imgPaths[j] << endl;Mat img = cv::imread(imgPaths[j]);vector<float>inputData = prepareImage(img);cout << inputData.size() << endl;cout << inputCount << endl;if ((int)(inputData.size()) != inputCount){std::cout << "InputSize error. check include/ctdetConfig.h" << std::endl;return false;}assert(inputData.size() == inputCount);int len = (int)(inputData.size());memcpy(ptr, inputData.data(), len * sizeof(float));ptr += inputData.size();std::cout << "load image " << imgPaths[j] << " " << (j + 1)*100. / imgPaths.size() << "%" << std::endl;}imageIndex += batchSize;CHECK(cudaMemcpy(deviceInput, batchData, inputCount * sizeof(float), cudaMemcpyHostToDevice));bindings[0] = deviceInput;return true;}const void* int8EntroyCalibrator::readCalibrationCache(std::size_t &length){calibrationCache.clear();std::ifstream input(calibTablePath, std::ios::binary);input >> std::noskipws;if (readCache && input.good())std::copy(std::istream_iterator<char>(input), std::istream_iterator<char>(),std::back_inserter(calibrationCache));length = calibrationCache.size();return length ? &calibrationCache[0] : nullptr;}void int8EntroyCalibrator::writeCalibrationCache(const void *cache, std::size_t length){std::ofstream output(calibTablePath, std::ios::binary);output.write(reinterpret_cast<const char*>(cache), length);}}
有了这个类,所有的问题都解决了,接下来只需要在解析ONNX模型之后利用这个类进行INT8量化就可以了。
带注释的代码解析如下:
// ONNX模型转为TensorRT引擎bool onnxToTRTModel(const std::string& modelFile, // onnx文件的名字const std::string& filename, // TensorRT引擎的名字IHostMemory*& trtModelStream) // output buffer for the TensorRT model{// 创建builderIBuilder* builder = createInferBuilder(gLogger.getTRTLogger());assert(builder != nullptr);nvinfer1::INetworkDefinition* network = builder->createNetwork();if (!builder->platformHasFastInt8()) return false;// 解析ONNX模型auto parser = nvonnxparser::createParser(*network, gLogger.getTRTLogger());//可选的 - 取消下面的注释可以查看网络中每层的详细信息//config->setPrintLayerInfo(true);//parser->reportParsingInfo();//判断是否成功解析ONNX模型if (!parser->parseFromFile(modelFile.c_str(), static_cast<int>(gLogger.getReportableSeverity()))){gLogError << "Failure while parsing ONNX file" << std::endl;return false;}// 建立推理引擎builder->setMaxBatchSize(BATCH_SIZE);builder->setMaxWorkspaceSize(1 << 30);nvinfer1::int8EntroyCalibrator *calibrator = nullptr;if (calibFile.size()>0) calibrator = new nvinfer1::int8EntroyCalibrator(BATCH_SIZE, calibFile, "F:/TensorRT-6.0.1.5/data/v3tiny/calib.table");//builder->setFp16Mode(true);std::cout << "setInt8Mode" << std::endl;if (!builder->platformHasFastInt8())std::cout << "Notice: the platform do not has fast for int8" << std::endl;builder->setInt8Mode(true);builder->setInt8Calibrator(calibrator);/*if (gArgs.runInInt8){samplesCommon::setAllTensorScales(network, 127.0f, 127.0f);}*///samplesCommon::setAllTensorScales(network, 1.0f, 1.0f);cout << "start building engine" << endl;ICudaEngine* engine = builder->buildCudaEngine(*network);cout << "build engine done" << endl;assert(engine);if (calibrator) {delete calibrator;calibrator = nullptr;}// 销毁模型解释器parser->destroy();// 序列化引擎trtModelStream = engine->serialize();// 保存引擎nvinfer1::IHostMemory* data = engine->serialize();std::ofstream file;file.open(filename, std::ios::binary | std::ios::out);cout << "writing engine file..." << endl;file.write((const char*)data->data(), data->size());cout << "save engine file done" << endl;file.close();// 销毁所有相关的东西engine->destroy();network->destroy();builder->destroy();return true
剩下的内容就是一些预处理和NMS后处理,这里就不再赘述了,执行完程序后就会在指定路径下生成INT8量化的Table文件以及INT8量化后的TRT序列化文件,后面就可以直接加载这个文件进行推理了。所有完整细节请看我的提供的完整源码。
5. 1050Ti的速度测试
| YOLOV3-Tiny TRT模型 | Inference Time |
|---|---|
| FP32 | 17ms |
| INT8 | 4ms |
在1050Ti上运行了20个Loop测试了速度,发现前向推理的速度有4倍提升,同时TRT序列化文件的大小也减少了4倍左右。
6. 源码获取
在GiantPandaCV公众号后台回复 INT8 获取完整CPP文件。注意TensorRT版本为6.0。
公众号二维码:

7. 附录
- TensorRT INT8量化官方PPT: http://on-demand.gputechconf.com/gtc/2017/presentation/s7310-8-bit-inference-with-tensorrt.pdf
- https://github.com/NVIDIA/TensorRT/tree/release/6.0/samples/opensource/sampleINT8
欢迎关注GiantPandaCV, 在这里你将看到独家的深度学习分享,坚持原创,每天分享我们学习到的新鲜知识。( • ̀ω•́ )✧
有对文章相关的问题,或者想要加入交流群,欢迎添加BBuf微信:





























:Docker 部署 Redis 以及相关配置信息")




还没有评论,来说两句吧...