SLAM:无人系统和增强现实overview
目录
1 本文介绍
2 SLAM与机器人领域常识
3 SLAM经历的阶段
4 SLAM知识框架
4.1 点云地图的弊端
4.2 深度学习
5 SLAM与无人系统的结合点
1 本文介绍
- 如题目所示,介绍SLAM在无人系统和增强现实方面的应用,这部分是一个overview。
- 链接:2017.11 https://www.chinahadoop.cn/course/1084/learn#lesson/20439
- 作者:杨亮(chiyangliang@gmail.com)
2 SLAM与机器人领域常识
- 机器人顶会:ICRA
机器人开源系统:
- ROS robot operating system

- 执行器(驱动器)-》感知器(传感器)-》控制器-》环境理解-》定位-》导航-》避障
SLAM知名综述:
SLAM能提供什么:
- 高速高精定位
- 尺度信息,三维模型

3 SLAM经历的阶段
滤波器模型
- 奠基人:javier civera, Andrew J. Davison 提出 EKF monocular SLAM
模型图:
滤波器模型的缺陷:
- 公式中0-k,k一直在增加,计算量一直在膨胀
滤波器-》图优化
- EKF-SLAM -》 PTAM-SLAM
滤波器越来越重要:
便宜:IMU+相机
- 不用RGBD: 不实用:尺寸大用在手机上,功耗大
使用滤波器的源头:
- 运动控制的估计量+观测量,通过贝叶斯概率的方式进行融合
- RGBD-SLAM
- ORB-SLAM
- LSD-SLAM: 基于连续两张图片的照度不变
激光SLAM
- 主动式的(基于图像是被动式的)
- 最大问题:定位精度太高,单帧地图的理解能力特别强(如:ICP)
激光领域的大神: zhang ji 精度0.5m
- LOAM
- V-LOAM
谷歌:
- 标准:Cartographer
伯克利大学:
- BLAM 开源的 效果还可以
- SegMatch

4 SLAM知识框架
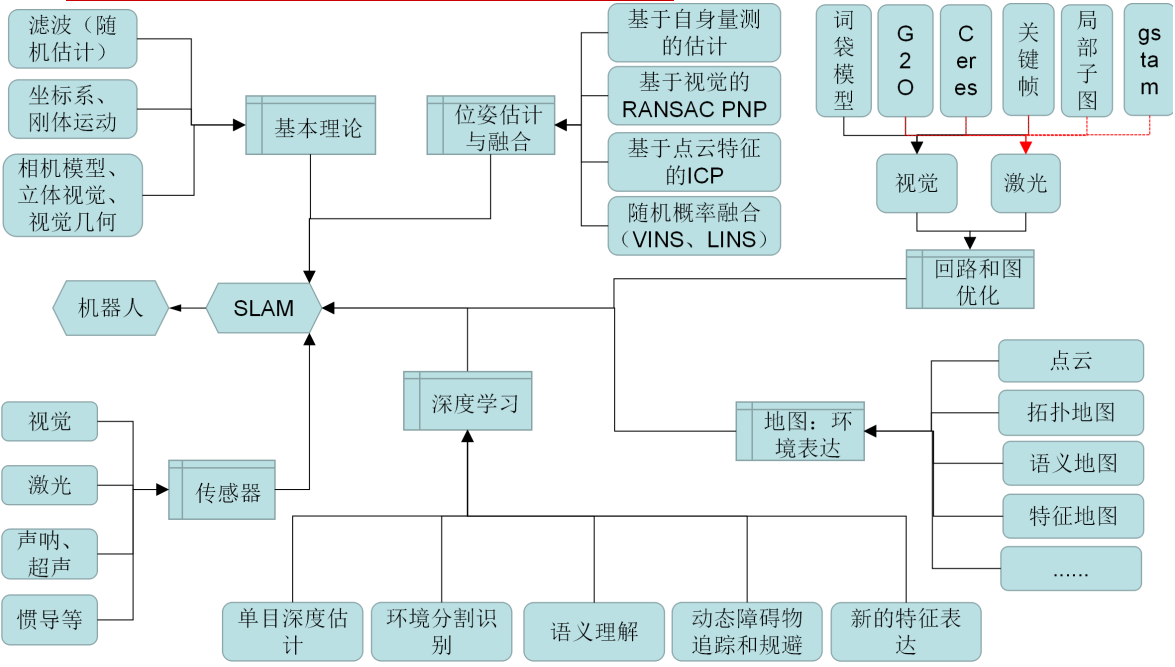
深度还原:
通过单目还是双目,做深度还原都是不靠谱的,因为这个滤波器问题
- 即概率问题
- 方案:RGBD 深度相机
卡尔曼滤波器:
- 在贝叶斯估计的基础上,加上了噪声是高斯分布的估计
四元数:
- 将位-姿用向量的形式表示,然后两个向量之间一次旋转到位
对比欧拉角:必须绕一个轴旋转,比如:先x再y再z….严格的顺序
- 最大弊端:万向节锁(Gimbal Lock)问题
回路和图优化
- 开源工具包:G2O, Ceres
4.1 点云地图的弊端
- 都是点,理解起来比较困难
- 激光的相应比较慢
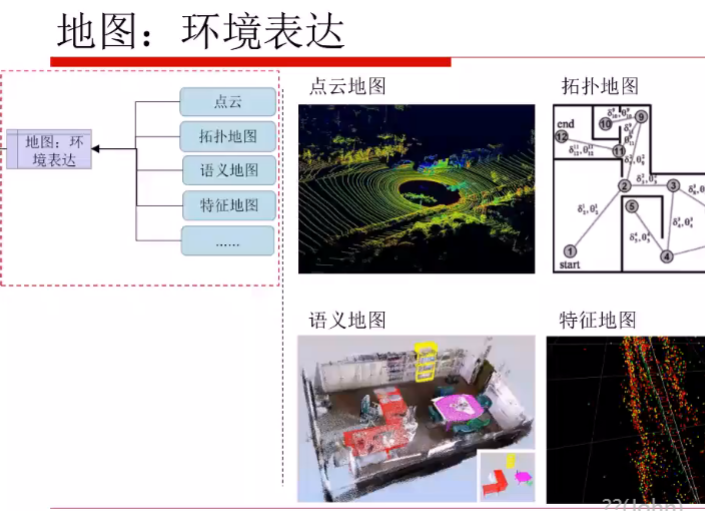
热点:
- 语义地图(如PointNet),场景理解
- 代表人物:李飞飞博士 dense capture
4.2 深度学习
热点:
- 单目深度估计- 如基于视觉
目前在美国状态:
- 更侧重于编程:因为理论知识要求少,而实践应用要求高
动态障碍物追踪和规避
目前先进的方法:end-to-end方法
- 直接使用图片+depth进行解算,输出该左转还是右转
创业:
- camare-IMU融合! 低成本,VR&AR 应用广泛
- VR一键装修,家具,装饰等
Event Camera
- 与传统相机相比,Event Camera是完全不同的,它不是记录一个场景的,而是记录一个场景的变化。在一个没有物体移动的场景中架设一台Event Camera,它不会显示任何东西。但是一旦Event Camera检测到运动(像素级的光线发生了变化),它就会在每个像素的基础上以非常高的刷新率(毫秒)呈现出来。如果你所关心的是在移动时避开物体,一台Event Camera就是你的不二之选,因为这种相机只是在寻找像素的变化,对低光也很敏感,并且不会因为强光而拍不到移动物体。
- https://www.zhihu.com/question/47111443
- https://blog.csdn.net/libocao/article/details/90201141
5 SLAM与无人系统的结合点
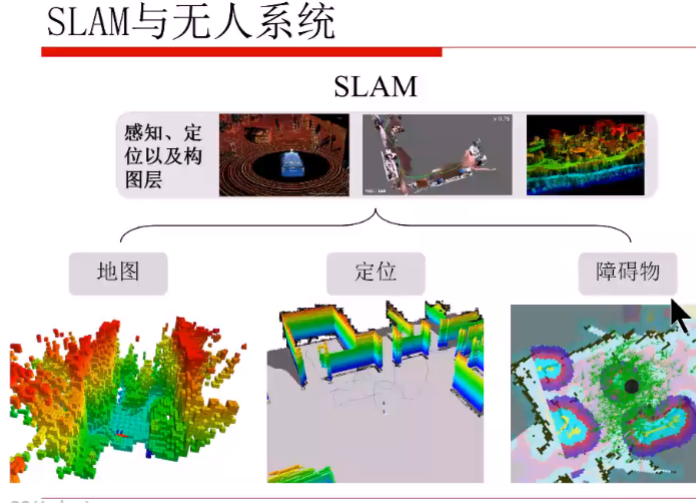
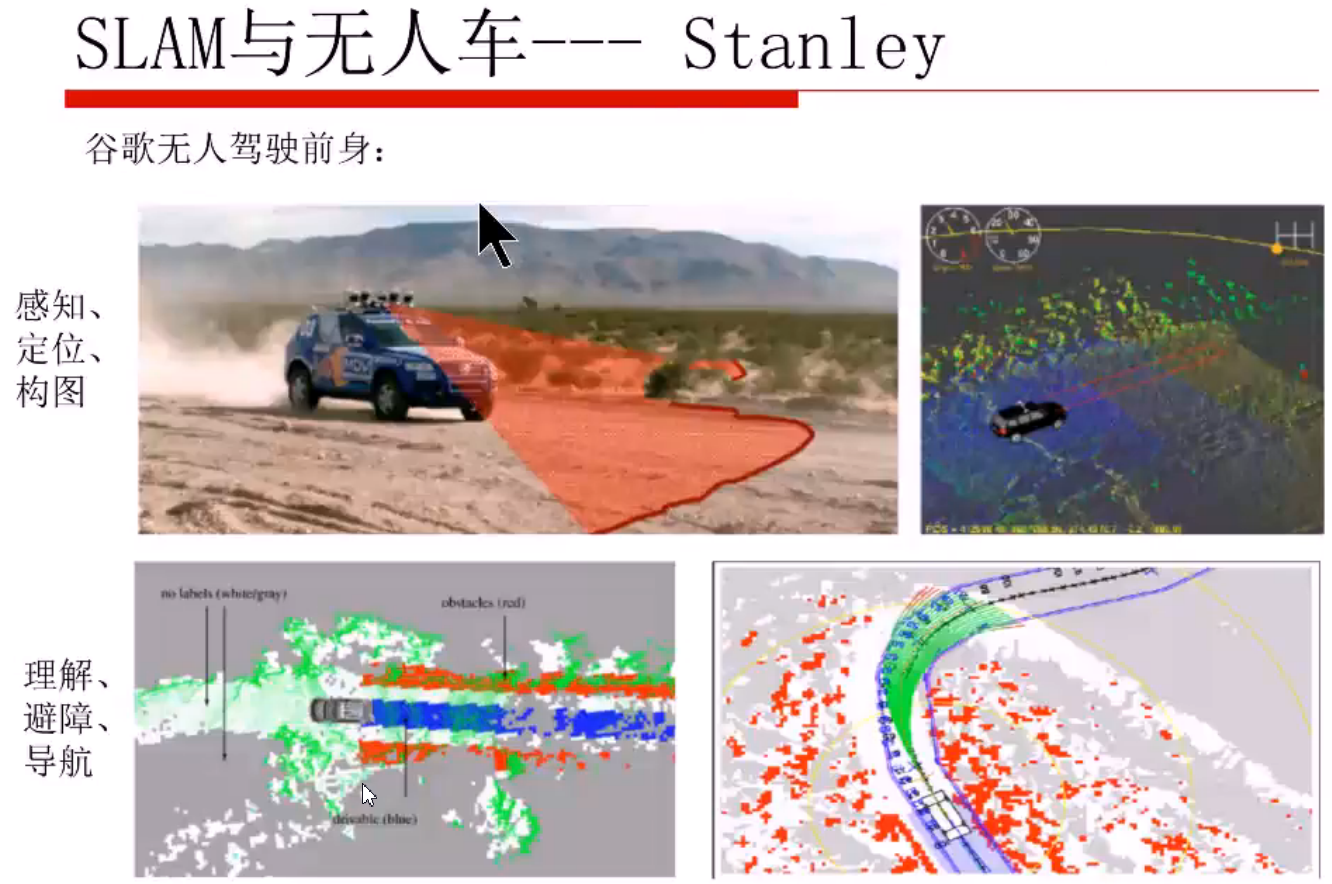
增强现实与无人驾驶:
- JOCOMMENT:如将行驶信息,直接投影到车道上去…
增强现实推荐书籍:

























")








还没有评论,来说两句吧...