基于51单片机的智能小车
这个是为了去年参加某比赛的作品。
功能:
蓝牙启动,
变速,
蔽障,
舵机摆臂攻击,
目标搜索,
其它
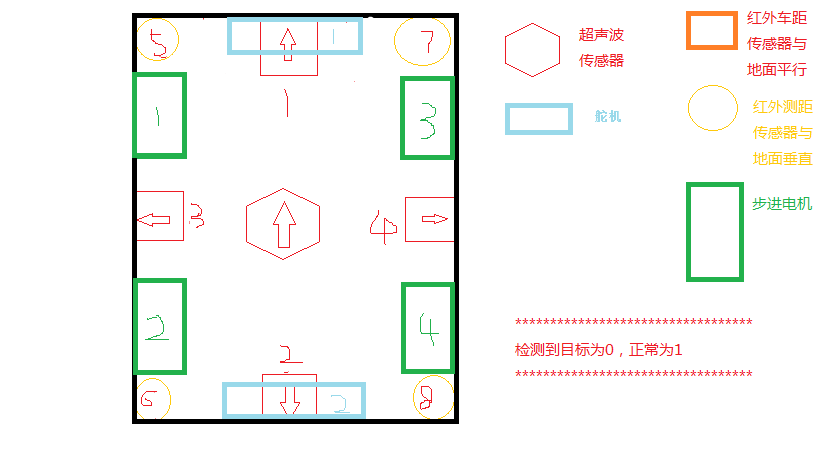
硬件搭建布局图:

在实验室写的程序,没及时备份。。完整版的程序没有了!
只实现部分模块功能的源码:
#include "reg52.h"#include<math.h>#define uint unsigned int#define uchar unsigned char#define Cycle 20000 //定义周期uint PWM_Value[8];uchar order=0; //中断步长//按键检测//sbit key1=P2^0;//sbit key2=P2^1;//PWM的输出端口sbit PWM_OUT0=P2^5;sbit PWM_OUT1=P2^6;//红外检测口sbit H1 = P0^0;sbit H2 = P0^1;sbit H3 = P0^2;sbit H4 = P0^3;sbit H5 = P0^4;sbit H6 = P0^5;sbit H7 = P0^6;sbit H8 = P0^7;//步进电机方向口sbit B1 = P1^4;sbit B2 = P1^5;sbit B3 = P1^6;sbit B4 = P1^7;//步进电机脉冲口sbit BU1 = P1^0;sbit BU2 = P1^1;sbit BU3 = P1^2;sbit BU4 = P1^3;int i,key1,key2;/********************************************延时程序*********************************************/void delay(uint t,uint ti){uint k;while(t--){for(k=0; k<ti; k++){ }}}/**********************************************************步进电机运行* //正常为20,加速16;delay:正常(2,50)加速(2,40)* //转向 16 2 50**********************************************************/void motor_ffw(int nu1,int nu2,int nu3){uchar i;for (i=0; i<nu1; i++){BU1 = ~BU1;BU2 = ~BU2;BU3 = ~BU3;BU4 = ~BU4;delay(nu2,nu3);}}/********************************************************** 按键检测**********************************************************/void keyscan(){if(key1==0) //高电平加{if(PWM_Value[0]<2000)PWM_Value[0]+=2;if(PWM_Value[1]<2000)PWM_Value[1]+=2;}if(key2==0) //高电平减{if(PWM_Value[0]>1000)PWM_Value[0]-=2;if(PWM_Value[1]>1000)PWM_Value[1]-=2;}delay(5,20);}/*********************************************************** ** 步进电机驱动 **num表示距离,num1表示步进电机脉冲频率, **num2和num3表示延迟时间长度 ************************************************************/void motor_forward(int num,int num1,int num2,int num3) //前进{B1 = 1;B2 = 1;B3 = 0;B4 = 0;while(num--){motor_ffw(num1,num2,num3);}}void motor_backward(int num,int num1,int num2,int num3) //后退{B1 = 0;B2 = 0;B3 = 1;B4 = 1;while(num--){motor_ffw(num1,num2,num3);}}void motor_left(int num,int num1,int num2,int num3) //左转{B1 = 0;B2 = 0;B3 = 0;B4 = 0;while(num--){motor_ffw(num1,num2,num3);}}void motor_right(int num,int num1,int num2,int num3) //右转{B1 = 1;B2 = 1;B3 = 1;B4 = 1;while(num--){motor_ffw(num1,num2,num3);}}/**********************************************************红外测距传感器函数 ,0为检测到障碍物,1为正常**********************************************************/void red_driver(){if((H5|H6|H7|H8) == 1) //检测小车是否到达擂台边缘{if((H5&H7) == 1){//检测小车正前方到达边缘,先退后,再右转motor_backward(20,20,2,50);motor_right(36,16,2,50);}else if((H6&H8) == 1){//检测小册正后方到达边缘motor_forward(20,20,2,50);motor_right(36,16,2,50);}else{ //检测小车四个角落到达边缘if (H5 == 1){motor_backward(20,20,2,50);motor_right(36,16,2,50);}else if (H6 == 1){motor_forward(10,20,2,50);}else if (H7 == 1){motor_backward(20,20,2,50);motor_left(36,16,2,50);}else if (H8 == 1){motor_forward(10,20,2,50);}}}else if((H3&H4) == 0) //检测小车左右两边是否有障碍物{if (H3 == 0){motor_left(36,16,2,50);}else if (H4 == 0){motor_right(36,16,2,50);//38}}else if(H2 == 0){ //检测小车后面是否有障碍物,加速倒退motor_backward(20,16,2,40);}else if(H1 == 0){ //检测小车前面是否有障碍物,加速冲击motor_backward(20,16,2,40);}elsemotor_forward(1,20,2,50);}/********************************************初始化*********************************************/void init(){SCON = 0x50; //REN=1允许串行接受状态,串口工作模式1TMOD|= 0x21; //定时器工作方式2PCON|= 0x80;//TH1 = 0xFD; //baud*2 /* reload value 19200、数据位8、停止位1。效验位无 (11.0592)TH1 = 0xF3; // //baud*2 /* 波特率4800、数据位8、停止位1。效验位无 (12M)TL1 = 0xF3;TH0=(65536-500)/256;TL0=(65536-500)%256;TR1 = 1; //打开定时器1中断TR0 = 1; //启动定时器0ES = 1; //开串口中断ET0 = 1; //打开定时器0中断ET1 = 1; //打开定时器1中断EA = 1; // 开总中断PT0 = 0; //定时器0 设置为最高优先中断,1表示高,0表示低PX0 = 0; // 外部中断0 设置最低中断PS = 1; //串口中断}/**********************************************************主函数**********************************************************/void main(){init();PWM_Value[0]=1500;PWM_Value[1]=1500;H5=H6=H7=H8 =0;H1=H2=H3=1;H4 = key1 = 0;RI = 1;for(i=0;i<100;i++){keyscan();}key1 = 1;key2 = 0;while(1){}}/**********************************************************串口中断**********************************************************/void serial() interrupt 4{motor_forward(60,20,2,50);while(1){for(i=0;i<100;i++){keyscan();}key2 = 1;red_driver();}}/********************************************************//定时器0 中断子函数//这里输出几路波形 就应该为 20MS/N =X 那么X 就是N路平分时间//在用N-高电平时间 就为该路低电平时间咯。 就这么简单。。。*********************************************************/void timer0() interrupt 1{switch(order){case 1:PWM_OUT0=1;TH0=-PWM_Value[0]/256; //第一路输出高电平时长TL0=-PWM_Value[0]%256;break;case 2:PWM_OUT0=0;TH0=-(5000-PWM_Value[0])/256; //第一路 输出低电平时长TL0=-(5000-PWM_Value[0])%256;break;case 3:PWM_OUT1=1;TH0=-PWM_Value[1]/256;TL0=-PWM_Value[1]%256;break;case 4:PWM_OUT1=0;TH0=-(5000-PWM_Value[1])/256;TL0=-(5000-PWM_Value[1])%256;break;order=0;break;default: order=0;}order++;}

























")



")




还没有评论,来说两句吧...