【图像处理】灰度加权距离变换(GWDT)
#
【fishing-pan:https://blog.csdn.net/u013921430转载请注明出处】
前言
距离变换(distance transform,DT)在图像处理、计算机视觉等领域有非常多的运用,例如骨架化、目标细化、黏连目标分离等。在Matlab和OpenCV中都有进行距离变换的函数。Matlab中有bwdist函数用于二值化图像的距离变换, OpenCV中有cvDistTransform函数用于进行二值化图像的距离变换。
除此之外,Matlab中还提供了graydist函数用于灰度加权距离变换,但是graydist居然要输入一个种子点,这让我觉得很神奇,因为在我的印象中灰度加权距离变换是不需要种子点的!自己测试运行后就发现,这是扯淡呢!算出来的结果是图像中各个点到种子点的距离加权变换。所以,我必须来讲讲我所理解的不需要种子点的灰度加权距离变换。
灰度加权距离变换
一般的距离变换需要首先对图像进行二值化,这样的过程会损失掉图像中某些有用的信息,因为单纯的距离变换获得的是前景点到背景的最短距离,损失了灰度信息所代表的物理意义。因此在距离变换的基础上加上图像灰度信息,就有了灰度加权距离变换——GWDT(gray-weighted image distance transform),也可以称之为灰度尺度距离变换——GSDT(gray-scale image distance transform)。
理解了距离变换,灰度加权距离变换就很好理解了,就是在距离变换的基础上加上了灰度信息。那么如何操作呢?我采用类似于区域增长的方法,在快速行进法的框架下来进行实现它,基本步骤如下;
设定阈值分离前景和背景,将背景点的状态设置为ALIVE(其实所有的背景点都是seed point),将前景设为FAR,前景点的值初始化为无限大;
初始化边缘点,在FAR点中选取8邻域(对二维图像进行处理)中有背景点的点,这些点就是边缘点,将边缘点的值赋予原图中的值,更改其状态为TRAIL,并将其放入一个队列Q中;
在队列Q中不放回地取出点,假设取出的点记为y,计算y周围的8个点x,根据以下公式计算x,如果x的值被更新了,判断其是否已经在队列中,如果不在,那么就将其放入队列中。(在我实现的时候,考虑到效率的因素,并没有判断其是否已经在队列中,而是将其直接放入队列中,这个跟queue类和C++函数传参有关系)
- 循环第三步,直到队列Q为空。


从上面的步骤中可以看出,实现过程与快速行进算法还是存在一定的差异的,如果按照快速行进算法的思想,那么对于点y,只会计算周围8临域中属性是FAR的点的值,不会对ALIVE的点进行更新。但是上述的过程,会对ALIVE点进行更新。我这样做是为了尽量保证每个点在变换过后值尽量小,大家可以自行修改代码来决定要不要对ALIVE点进行更新。
如下图所示,假设图中蓝色的点为初始化后的边缘点,他的状态为TRAIL,点A的状态为FAR;依次遍历S1-S4周围的8个点,很显然A是这四个点的共同邻域,A取四个点对其进行变换后的最小值;
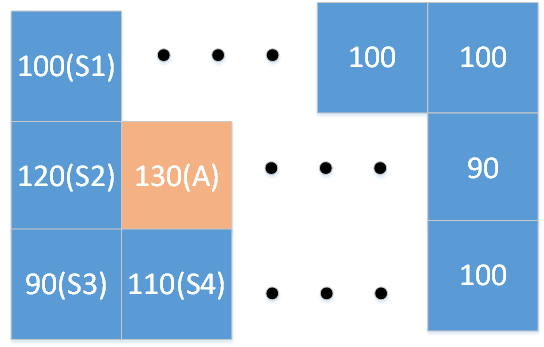
图 1 迭代过程示意图标题标题

处理结果

图 2 原始图像

图 3 处理后的图像
结果分析
原图中我加入了一些噪声,在GWDT后,前景点特别是远离背景的前景点的灰度值相对被增强了,这样背景点就变相的被抑制了。此外,通过设定阈值可以分离区域内的黏连的大米,从而自动进行记数。等等等等,GWDT的应用还有很多。总的来说,GWDT是在传统的距离变换的基础上保留和利用了灰度信息,更加具有物理意义和价值。
代码
为了方便大家学习,为大家提供源码;
//-------------------------//潘正宇 ,2018.05.10//灰度尺度距离变换,GSDT/GWDT//-------------------------#include <iostream>#include <vector>#include <opencv2/opencv.hpp>#include <opencv2/highgui/highgui.hpp>#include <opencv2/imgproc/imgproc.hpp>#include <queue>#include <string>using namespace std;using namespace cv;#define INF 3.4e+38 // 无穷大的点enum{ ALIVE = -1, TRIAL = 0, FAR = 1 }; //设定三种状态;bool find(queue<int> que,int value){int size = que.size();for (int i = 0; i <size; ++i){int a = que.front();if (a == value){return true;}que.pop();}return false;}bool GSDT(string &picPath){Mat Scr = imread(picPath, 0); //以灰度图的模式读入图像imshow("原始图", Scr);Mat gsdtImg; //创建GSDT后的图gsdtImg.create(Scr.size(), CV_32FC1);int row = Scr.rows;int col = Scr.cols;Mat mat_mean, mat_stddev;meanStdDev(Scr, mat_mean, mat_stddev);double mean;mean = mat_mean.at<double>(0, 0); //获取图像均值int *state= new int[col*row];for (int i = 0; i < row; i++){for (int j = 0; j < col; j++){if (Scr.at<uchar>(i, j)<(mean)){gsdtImg.at<float>(i, j) = Scr.at<uchar>(i, j); //背景点是ALIVE的state[i*col + j] = ALIVE;}else{gsdtImg.at<float>(i, j) = INF;state[i*col + j] = FAR;}}}queue<int> TrailQue; //定义队列用于存放TRAIL的点for (int i = 1; i < row-1; i++){for (int j = 1; j < col-1; j++){if (state[i*col + j] == FAR) //如果这个点是前景点,那么搜寻这个点周围是否有背景点,如果是那么它就是边缘点;{for (int o = -1; o <= 1; o++){for (int p = -1; p <= 1; p++){if (state[(i + o)*col + j + p] == ALIVE) //找到所有的边缘点,并且将其放入队列TrailQue;{state[i*col + j] = TRIAL;gsdtImg.at<float>(i, j) = Scr.at<uchar>(i, j);TrailQue.push(i*col + j);break;}}}}}}while (!TrailQue.empty()){int P_row = TrailQue.front() / col; ///获取TrailQue中点的坐标int P_col = TrailQue.front() % col;if (P_row < 1){ P_row = 1; }if (P_row>row - 2){ P_row = row - 2; }if (P_col < 1){ P_col = 1; }if (P_col>col - 2){ P_col = col - 2; }for (int o = -1; o <= 1; o++){for (int p = -1; p <= 1; p++){int N = (P_row + o)*col + P_col + p;double len = sqrt(o*o + p*p);float gs = gsdtImg.at<float>(P_row, P_col) + Scr.at<uchar>(P_row + o, P_col + p)*len;//---比较该点现有的GSDT值与P点给它的值;if (gsdtImg.at<float>(P_row + o, P_col + p) > gs){state[N] = TRIAL;gsdtImg.at<float>(P_row + o, P_col + p) = gs;TrailQue.push(N);/*if (!find(TrailQue, N)){TrailQue.push(N);}*/}}}TrailQue.pop(); //从TrailQue中删除这个点}//寻找最大值;float Max = 0;for (int i = 0; i < row; i++){for (int j = 0; j < col; j++){if (gsdtImg.at<float>(i, j)>(INF / 100)){gsdtImg.at<float>(i, j) = 0;}if (gsdtImg.at<float>(i, j)>Max)//&&gsdtImg.at<float>(i, j)<(INF/10){Max = gsdtImg.at<float>(i, j);}}}//将图像像素区间压缩到0-255Mat Dst;Dst = Scr.clone();for (int i = 0; i < row; i++){for (int j = 0; j < col; j++){Dst.at<uchar>(i, j) = 255 * gsdtImg.at<float>(i, j) / (Max+1);}}imwrite("temp.bmp", Dst);//归一化gsdtImg = gsdtImg / (Max+1);cout << gsdtImg.at<float>(20, 206);imshow("GSDT",gsdtImg);waitKey(0);return true;}void main(){string picPath = "G:\\博客\\图像处理\\灰度尺度距离变换\\rice.jpg";GSDT(picPath);system("pause");return;}


























的学习记录")


![[hbase] hbase的架构及其各角色功能](https://image.dandelioncloud.cn/images/20230601/3b9ef42ad8a9409390d4df738d8087d6.png "[hbase] hbase的架构及其各角色功能")
")



还没有评论,来说两句吧...