RPY_Euler_Quaternion_AngleAxis角度转化:Matlab、Python、ROS、Halcon版本
UR协作机器人和Franka机器人导出的位姿为angleVector,三个量表示,在Matlab中angleVector是四个量表示。如果是三个量的表示推荐使用Python的scipy库做转换。
在线欧拉角-四元数-齐次矩阵转换
https://www.andre-gaschler.com/rotationconverter/
Rotation vector介绍
https://en.wikipedia.org/wiki/Axis%E2%80%93angle_representation#Rotation_vector
一、RPY_Euler_Quaternion_AngleAxis角度转化:Matlab机器人工具箱
1.1 Quaternion转Matrix (带位置和姿态)

% 位置及四元数xyzw转齐次矩阵robotHtool =[0.10345922, -0.48407779, 0.29668114, -0.03533355, 0.09830182, -0.86382214, 0.49284846];% w x y zrobotHtool_qua = Quaternion([robotHtool(7), robotHtool(4), robotHtool(5) , robotHtool(6)])robotHtool_matrix = transl(robotHtool(1), robotHtool(2), robotHtool(3)) * robotHtool_qua.T% 位置及欧拉角xyz转齐次矩阵(默认单位:弧度)robotHtool =[0.400422, -0.0262847, 0.365594, 3.1342, 0.0193, -1.6122];robotHtool_rpy = rpy2tr([robotHtool(4), robotHtool(5) , robotHtool(6)]); % 'deg' or 'zyx'T61 = transl(robotHtool(1), robotHtool(2), robotHtool(3)) * robotHtool_rpy;
二、Python的scipy
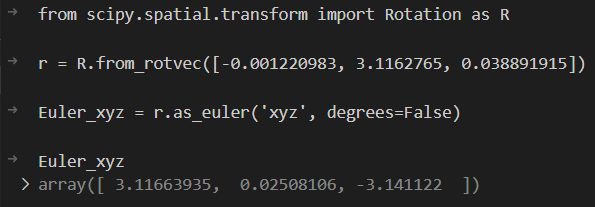
2.1 UR机器人rotvec转换为RPY_rxryrz
UR机械臂通过30003端口发送过来的是rotation vector
https://www.universal-robots.com/articles/ur/explanation-on-robot-orientation/
https://www.universal-robots.com/articles/ur/rpy-tofrom-rotation-vector/

安装或升级scipy(≥1.2.0):
Python3:pip3 install scipy==1.2.0
python2:pip install scipy==1.2.0
from scipy.spatial.transform import Rotation as Rr = R.from_rotvec([-0.001220983, 3.1162765, 0.038891915])Euler_xyz = r.as_euler('xyz', degrees=False)
scipy spatial transform官方帮助:
https://docs.scipy.org/doc/scipy/reference/generated/scipy.spatial.transform.Rotation.html
r1 = R.from_euler('zyx', [0, 0, 180], degrees=True)r2 = R.from_quat(0, 0, 0, 1) (scalar-last format即x y z w模式)r3 = R.from_matrix([[1, 0, 0], [0, -1, 0], [0, 0, -1]])r1.as_matrix()r2.as_rotvec()r3.as_euler('xyz', degrees=True)r_array = np.asarray(r)
scipy中的四元数有时候会遇到正负号计算出来跟别的(matlab等)刚好相反的问题,按官方说法其实都是同一种姿态。(看具体平台,但是有时候确实会让结果出错,Just for your information.)
2.2 ROS tf坐标转换
http://docs.ros.org/en/kinetic/api/tf/html/python/transformations.html
import tf.transformationsR = tf.transformations.euler_matrix(3.14, 0, 0, axes='rxyz')R[0][3] = 1.0R[1][3] = 2.0R[2][3] = 3.0scale, shear, angles, trans, persp = tf.transformations.decompose_matrix(R)T0 = [1, 2, 3]R1 = tf.transformations.compose_matrix(scale, shear, angles, T0, persp)R3 = quaternion_matrix((1, 0, 0, 0))tf.transformations.quaternion_from_matrix(R)tf.transformations.inverse_matrix(R)tf.transformations.euler_from_matrix(R, axes='rzyx')
2.3 川崎机器人Euler_ZYZ转四元数Quaternion
import sysimport numpy as npfrom scipy.spatial.transform import Rotation as Rf_result=open('/home/yake/Python_ws/kawasaki_convert_qua.txt','a')with open(r'/home/yake/Python_ws/kawasaki.txt','r') as f:while True:line = f.readline()if line:list = line.split (",")li = []for i in list:li.append(float(i))result = []result.append( li[0]/1000.0)result.append( li[1]/1000.0)result.append( li[2]/1000.0)r = R.from_euler('zyz', [li[3], li[4], li[5]], degrees=True)euler_xyz = r.as_quat()result.append( euler_xyz[0] )result.append( euler_xyz[1])result.append( euler_xyz[2])result.append( euler_xyz[3])np.savetxt( f_result, result, fmt='%0.8f', delimiter=',',newline=',')f_result.write("\n")else:breakf_result.close()
三、Halcon姿态变换
3.1 Halcon 的姿态、齐次变换和四元数
create_pose函数是包含位置和姿态的,姿态格式为RPY_rx_ry_rz,注意输入为角度。pose_to_hom_mat3d是RPY_rx_ry_rz转为齐次矩阵。四元数的顺序是w, x, y, z
robot_V_cam := [0.418906862152, 0.471104634456, 0.729862740299, 2.851, -1.241, -0.008]* Create pose use degrees.create_pose (robot_V_cam[0], robot_V_cam[1], robot_V_cam[2], deg(robot_V_cam[3]), deg(robot_V_cam[4]), deg(robot_V_cam[5]), 'Rp+T', 'gba', 'point', Pose)pose_to_hom_mat3d(Pose, robot_H_cam)pose_to_quat(Pose, robot_Q_cam)hom_mat3d_to_pose(robot_H_cam, pose_test1)************************* xyz *********************************************hom_mat3d_identity (HomMat3DIdentity)hom_mat3d_translate (HomMat3DIdentity, robot_V_cam[0], robot_V_cam[1], robot_V_cam[2], HomMat3DTranslate)hom_mat3d_rotate_local (HomMat3DTranslate, robot_V_cam[3], 'x', HomMat3DT_Rl)hom_mat3d_rotate_local (HomMat3DT_Rl, robot_V_cam[4], 'y', HomMat3DT_Rl_Rm)hom_mat3d_rotate_local (HomMat3DT_Rl_Rm, robot_V_cam[5], 'z', HomMat3D)hom_mat3d_to_pose (HomMat3D, pose_test2)********************* right-left old zyx **********************************hom_mat3d_identity (HomMat3DIdent)hom_mat3d_rotate (HomMat3DIdent, robot_V_cam[5], 'z', 0, 0, 0, HomMat3DRotZ)hom_mat3d_rotate (HomMat3DRotZ, robot_V_cam[4], 'y', 0, 0, 0, HomMat3DRotYZ)hom_mat3d_rotate (HomMat3DRotYZ, robot_V_cam[3], 'x', 0, 0, 0, HomMat3DXYZ3)hom_mat3d_translate(HomMat3DXYZ3, robot_V_cam[0], robot_V_cam[1], robot_V_cam[2], HomMat3Dzyx)hom_mat3d_to_pose(HomMat3Dzyx, pose_test3)




























还没有评论,来说两句吧...