ZYNQ linux下AXI4从机接口的使用
vivado版本:2017.4
petalinux版本:2017.4
1、vivado硬件设计
vivado中并没有自带的AXI4接口可以使用,所以我们需要自己创建
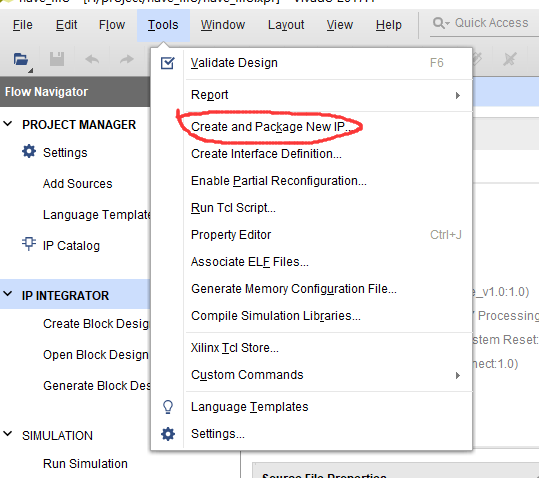
选择创建一个新的AXI4外设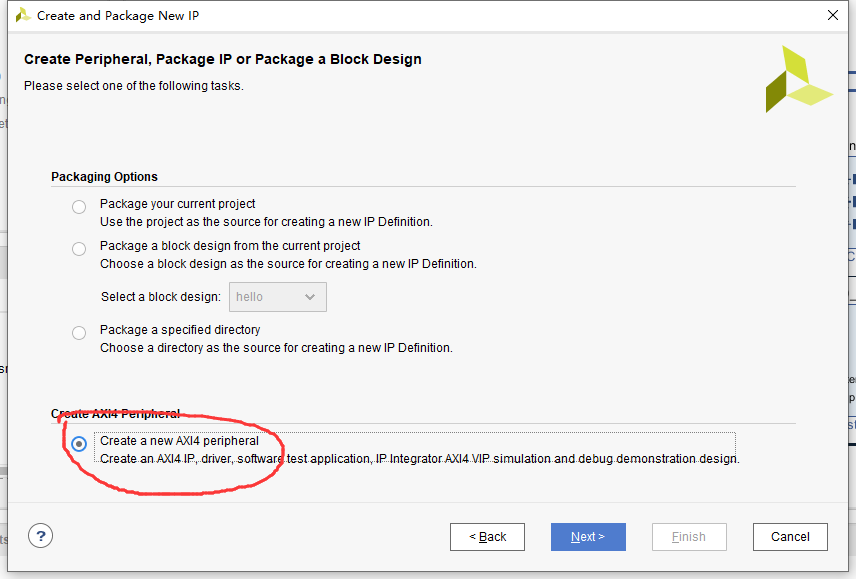
更改名字然后next,IP核的位置会放在你工程项目目录下
选择接口类型为Full,选择接口存储大小,我这里选择的是1024字节。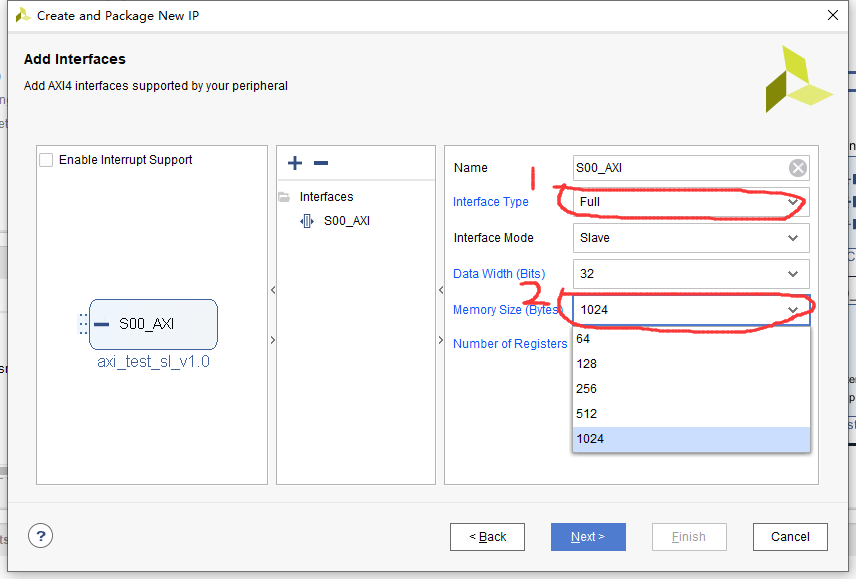
点击finish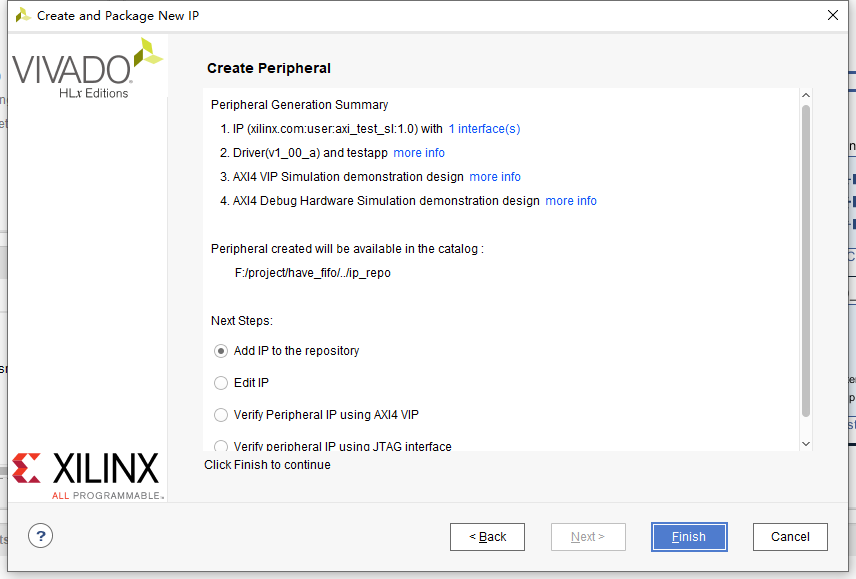
将自定义的核添加到 block design 中
添加 smart_connect IP核
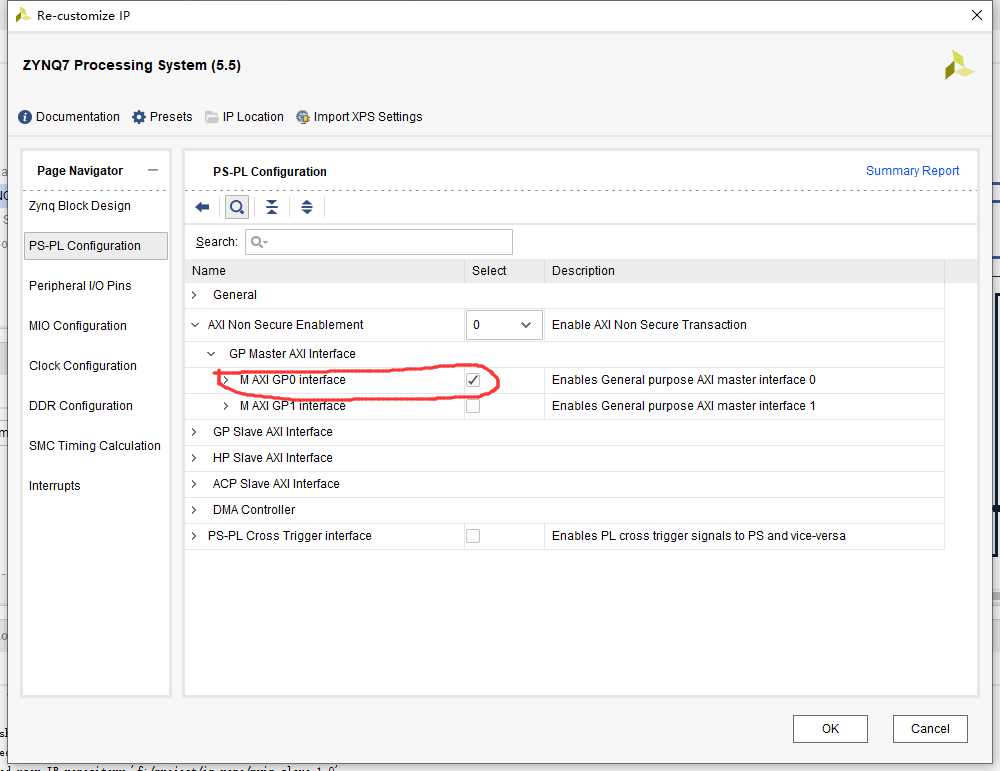
添加处理器,处理器相关设置根据自己的板子来进行设计。
想要使用AXI4从机接口,就必须打开GP0 主机接口
添加完成后,启动自动连接自动连接
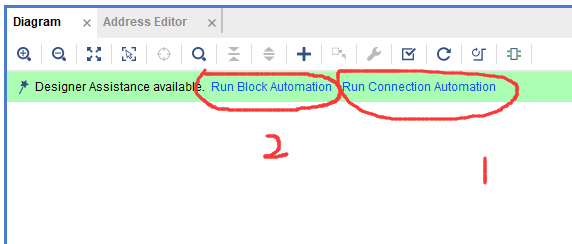
最终完成的硬件图(不同ZYNQ芯片设计效果图不同,但一定要开启GP0接口):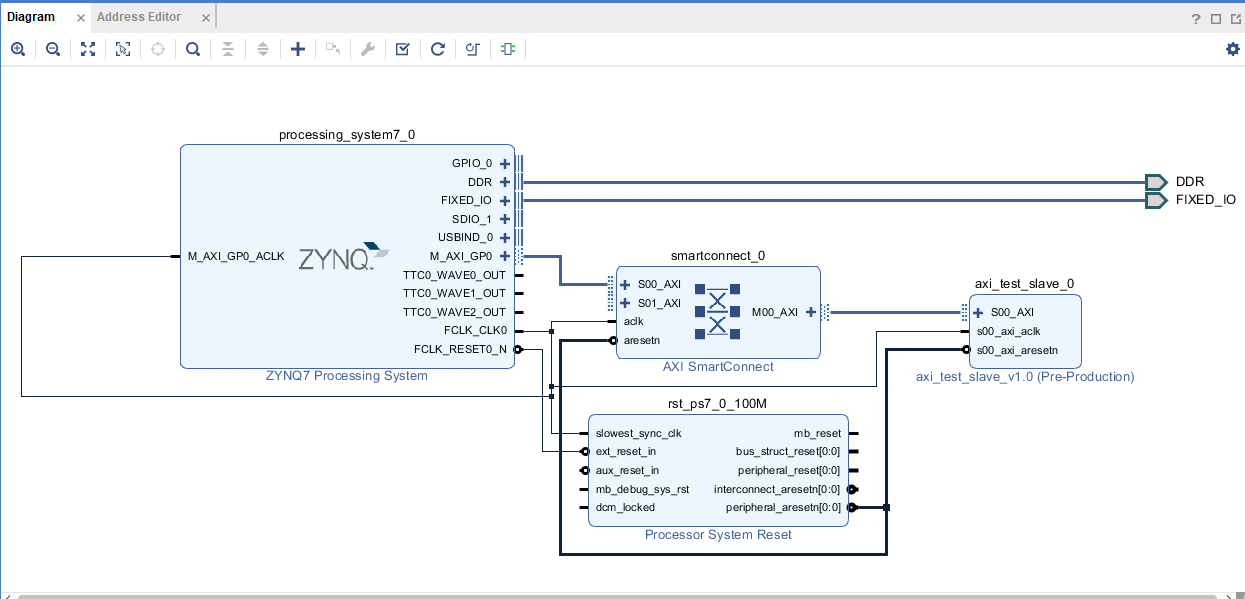
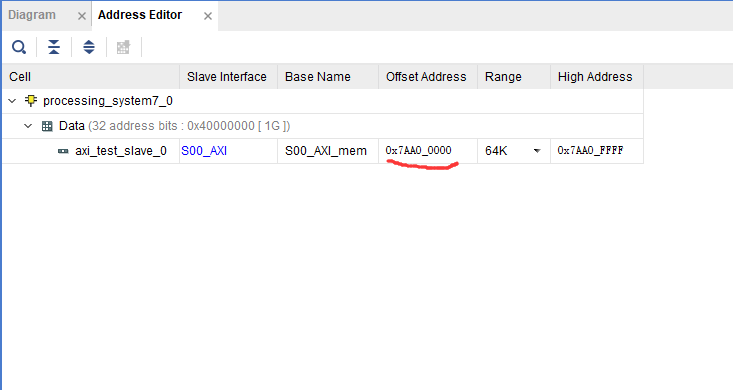
查看XI4从机接口的地址,地址是0x7aa00000,这个地址我们之后会用到
然后生成创建顶层文件,生成bit流这些我就不赘述了,如有疑惑可以看我的这篇博客:
https://blog.csdn.net/yohe12/article/details/104789041
2、使用petalinux生成系统并导入开发板
将硬件资源导入ubuntu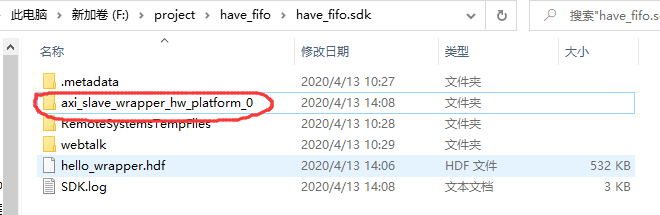
使用 petalinux-create -t project --template zynq --name axi4_test 命令创建项目
使用petalinux-config --get-hw-description=./axi_slave_wrapper_hw_platform_0命令来使用硬件资源生成系统
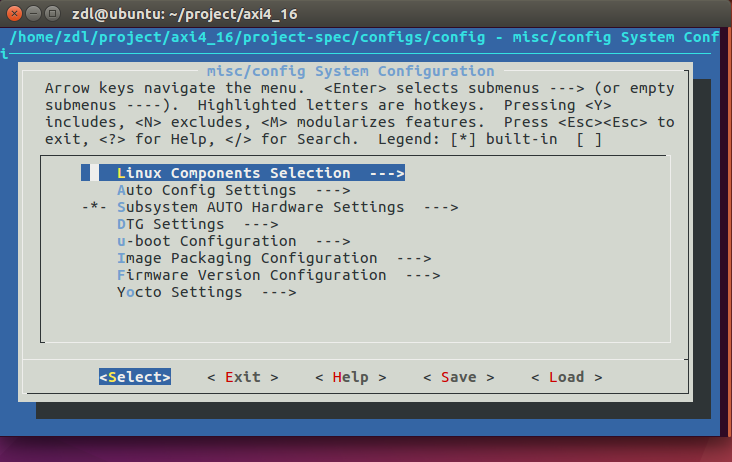
选择默认配置,然后选择 Exit 就会自动配置系统
使用 petalinux-build 命令编译系统
编译完成后,使用 petalinux-package --boot --fsbl zynq_fsbl.elf --fpga axi4_test_wrapper.bit --u-boot 生成BOOT.BIN
将BOOT.BIN 和 uimage.ub放入TF卡中,再启动开发板。
3、编写应用程序
现在我们要在应用程序中使用axi4的接口,使用mmap函数就可以将AXI4接口映射为一个地址,我们读写这个地址就相当于读写AXI4接口。
#include <stdio.h>#include <stdlib.h>#include <unistd.h>#include <errno.h>#include <sys/mman.h>#include <sys/stat.h>#include <sys/types.h>#include <sys/socket.h>#include <netinet/in.h>#include <string.h>#include <fcntl.h>#define PORT 3333#define AXI4_INTERFACE 0x7aa00000#define DATA_LEN 1024unsigned int *map_base0;void udp_server(void){int sockfd;if ((sockfd = socket(PF_INET, SOCK_DGRAM, 0)) < 0) {printf("create socket false\n");exit(1);}socklen_t len;struct sockaddr_in server_addr;int n;int opt = 1;len = sizeof(server_addr);server_addr.sin_family = AF_INET;server_addr.sin_addr.s_addr = htonl(INADDR_ANY);server_addr.sin_port = htons(PORT);setsockopt(sockfd, SOL_SOCKET, SO_REUSEADDR, &opt, sizeof(opt));if (bind(sockfd, (struct sockaddr *)&server_addr, sizeof(server_addr)) < 0) {printf("can not bind\n");exit(1);}while (1) {printf("\n========wait for client's request========\n");n = recvfrom(sockfd, map_base0, DATA_LEN, 0, (struct sockaddr *)&server_addr, &len);char buf[DATA_LEN];memcpy(buf, map_base0, n);printf("\n%x receive client's data: %s\n", map_base0, buf);sendto(sockfd, map_base0, n, 0, (struct sockaddr *)&server_addr, len);printf("\n%x send data to client: %s\n", map_base0, buf);memset(map_base0, 0, n);}close(sockfd);}void pl_peripheral(void){int devfd;if ((devfd = open("/dev/mem", O_RDWR | O_SYNC)) < 0) {printf("can not open /dev/mem \n");exit(1);}printf("\n open /dev/mem successful\n");map_base0 = mmap(NULL, DATA_LEN * 4, PROT_READ | PROT_WRITE, MAP_SHARED, devfd, AXI4_INTERFACE);if (map_base0 ==0) {printf("NULL pointer \n");}else {printf("mmap successful\n");}}int main(int argc, char **argv){pl_peripheral();udp_server();exit(0);}
使用交叉编译命令编译程序 :arm-linux-gnueabihf-gcc -o arm_server udp_server.c
最终效果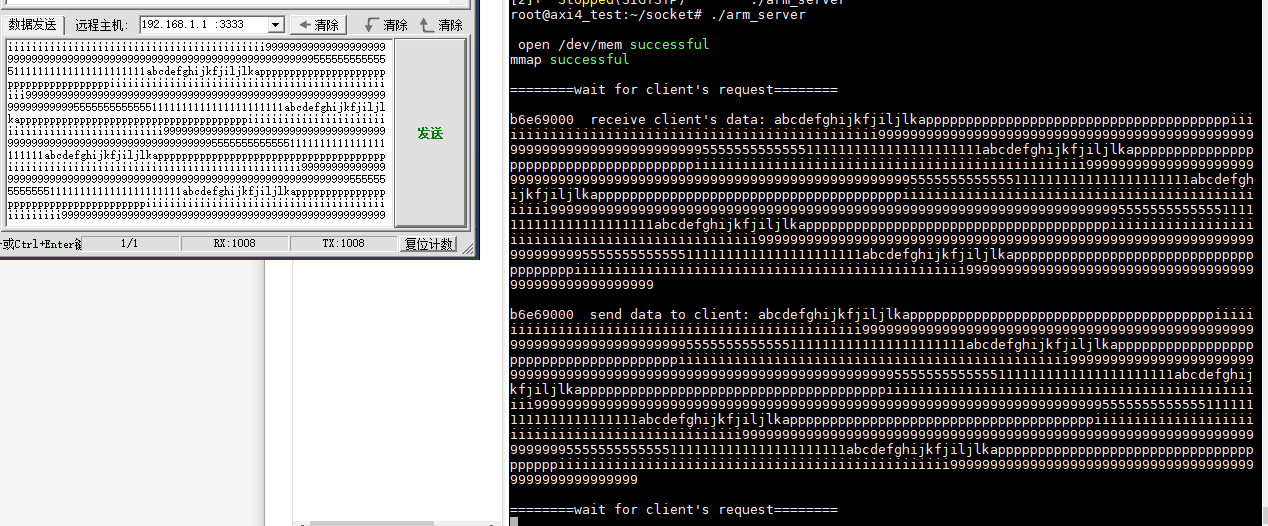
网口数据通过AXI4的接口进行了环回实验,但这个接口有1024字节的限制,当网络调试助手中发送的数据超过1024字节的时候,数据就会出错
这个AXI4接口是vivado中默认的接口,如果想解除1024字节的限制,那么必须自己编写AXI4的接口




























还没有评论,来说两句吧...