




























相关阅读
相关 【Apollo】阿波罗自动驾驶:塑造自动驾驶技术的未来
前言 ![请添加图片描述][c7f3e6b8a7624a9eabbea77dbcbca119.jpeg] 前些天发现了一个巨牛的人工智能学习网站,通俗易懂,风趣幽默,忍
相关 自动驾驶_ROS简介
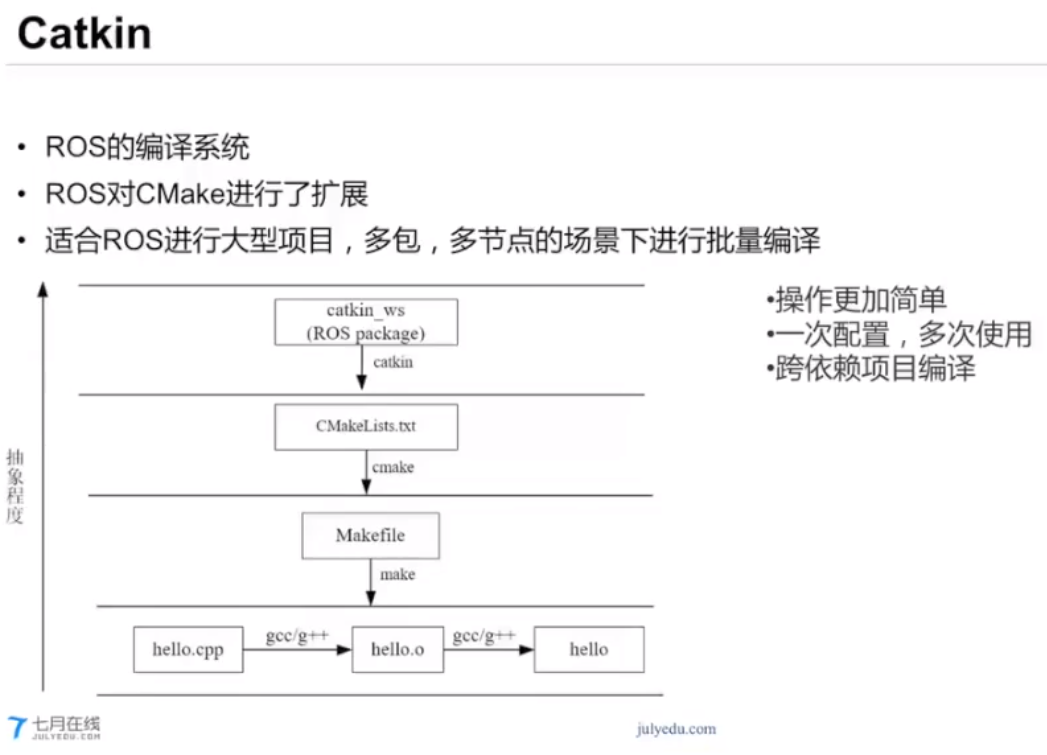
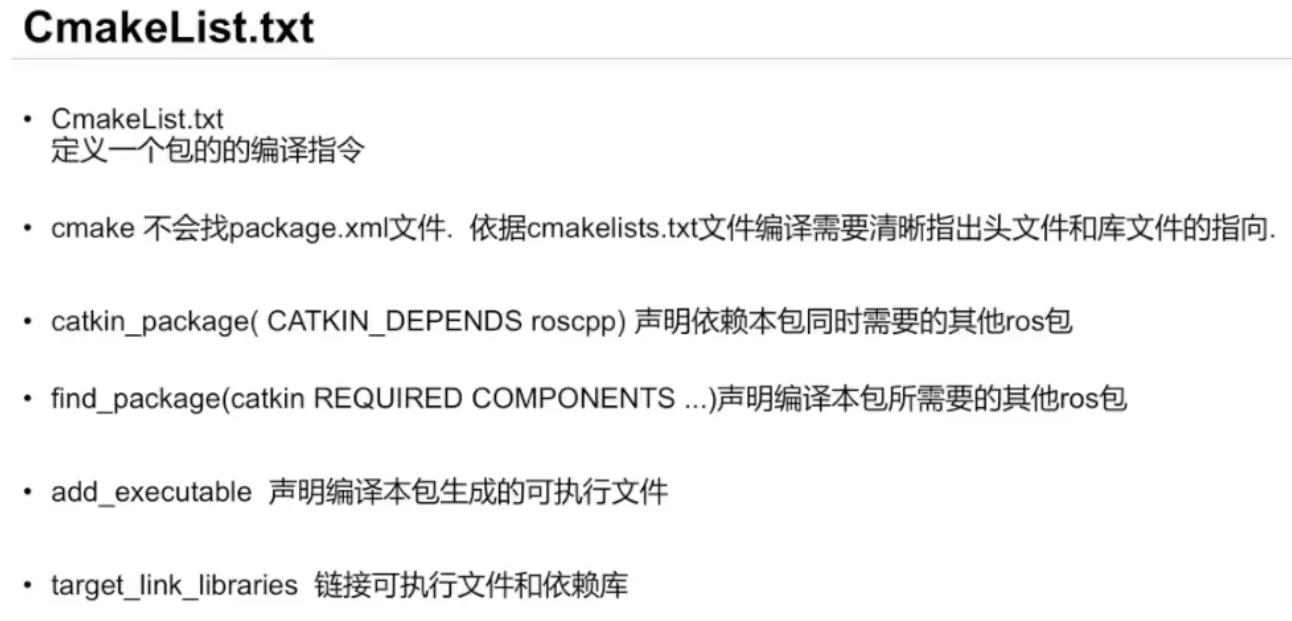
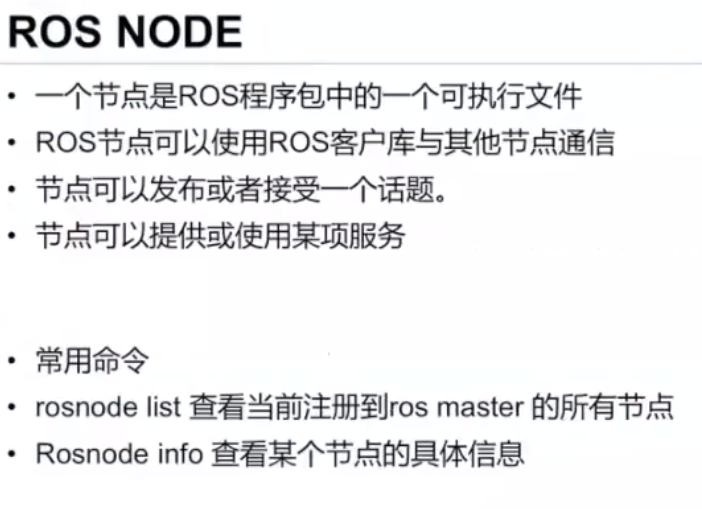
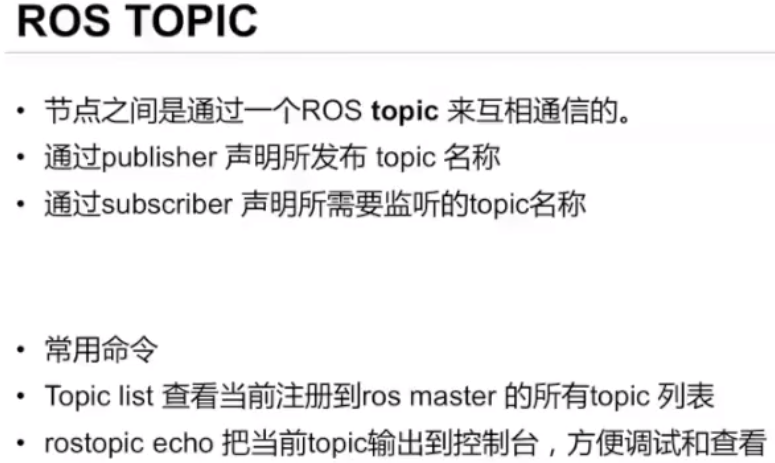
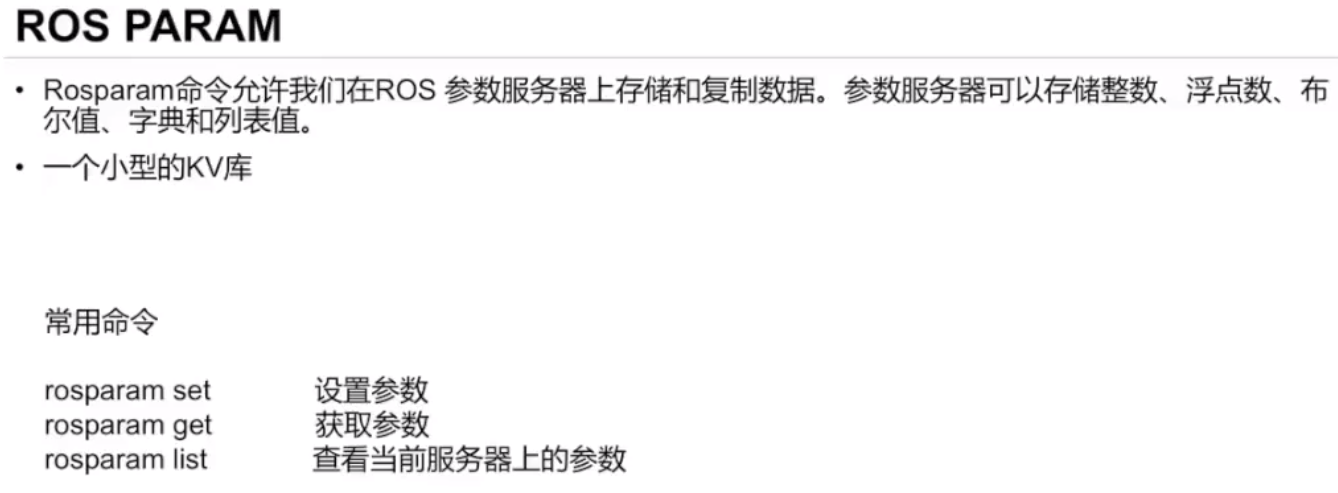
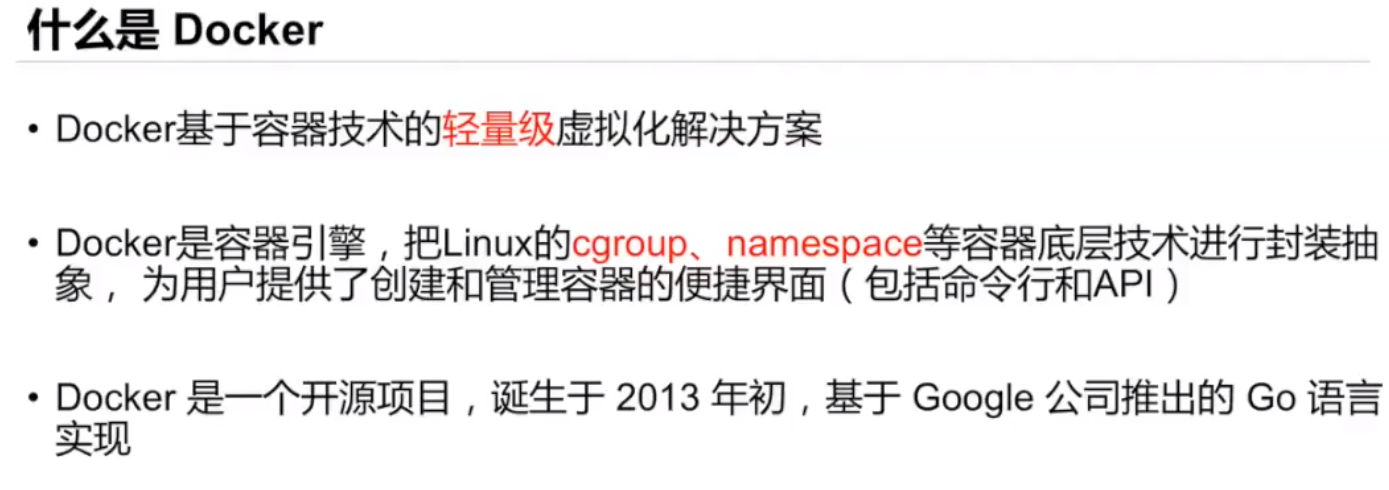
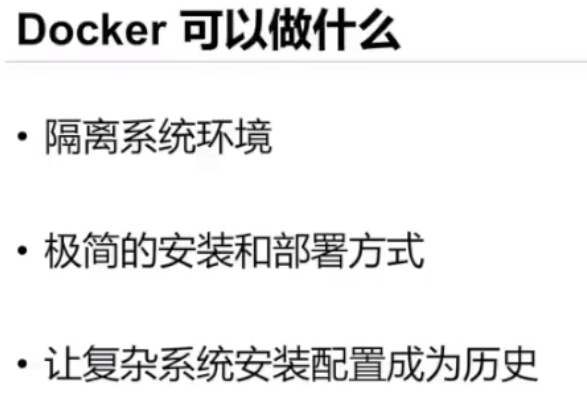
目录 1 ROS介绍 2 Catkin 2.1 package.xml 2.2 CmakeList.txt 3 ROS中基本概念 3 Docker -------
相关 自动驾驶_(无人驾驶)综述
目录 1 无人驾驶行业趋势与发展历程 2 无人驾驶分类 2.1 L4级别的无人驾驶 3 L4级别自动驾驶系统架构 3.1 硬件架构 3.2 软件架构 4 总结
相关 ROS---1简介
ROS (Robot Operating System) provides libraries and tools to help software developers c
相关 自动驾驶专题研究报告:自动驾驶产业链全梳理
核心观点 2021年自动驾驶正加速向L3买进。 2020年L3级自动驾驶开始普及已成为行业共识。2021年作为 自动驾驶技术进入L3等级的元年,是自动驾驶技术发展的重要节
相关 ROS学习(二)ROS入门简介
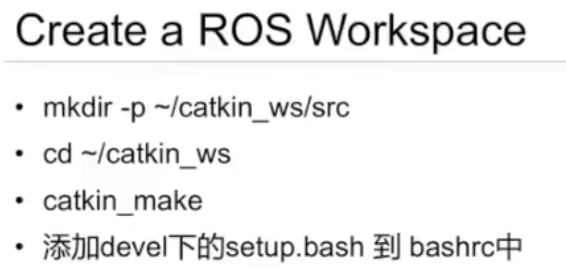
(在ubuntu下编辑可能效果不太好) 构建一个包必须包含两个文件: package.xml CMakeLists.txt 步骤: cd
相关 ROS探索总结(一)——ROS简介
ROS探索总结(一)——ROS简介(转自古-月) 一、历史 随着机器人领域的快速发展和复杂化,代码的复用性和模块化的需求原来越强烈,而已有的开源机器人系统又不能很好的适应需
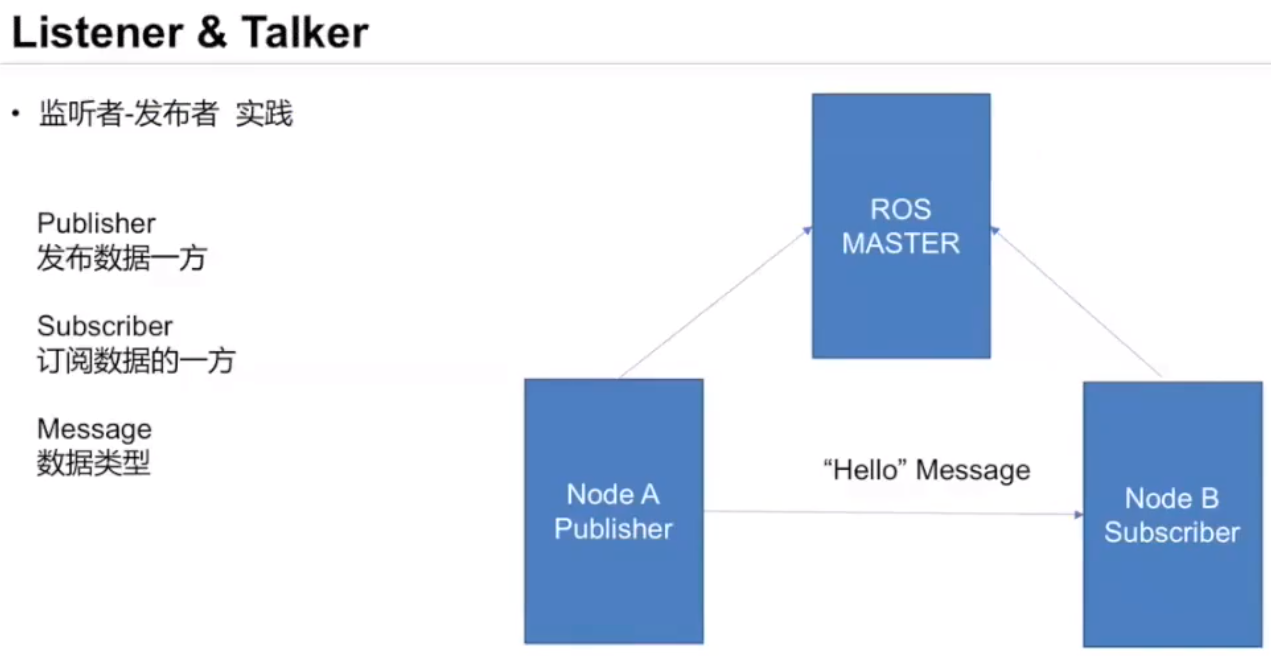
相关 无人驾驶技术——ROS通信机制
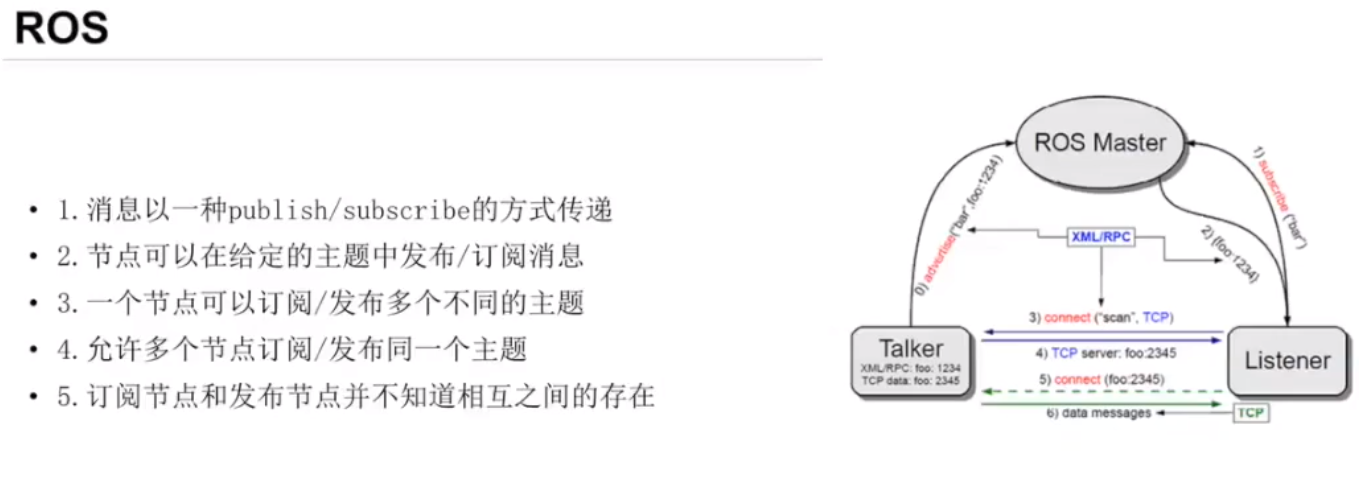
无人驾驶技术——ROS通信机制 ROS的通信机制有三种,分别为话题,服务和动作。下面就以思维导图的方式介绍这三种通信方式以及之间的区别和适用场景。 ROS通信机制——思维



实验二")





还没有评论,来说两句吧...