强化学习笔记+代码(二):SARSA算法原理和Agent实现
本文主要整理和参考了李宏毅的强化学习系列课程和莫烦python的强化学习教程
本系列主要分几个部分进行介绍
- 强化学习背景介绍
- SARSA算法原理和Agent实现
- Q-learning算法原理和Agent实现
- DQN算法原理和Agent实现(tensorflow)
- Double-DQN、Dueling DQN算法原理和Agent实现(tensorflow)
- Policy Gradients算法原理和Agent实现(tensorflow)
- Actor-Critic、A2C、A3C算法原理和Agent实现(tensorflow)
一、SARSA算法原理
上一篇内容奖励,强化学习的主要功能就是让agent学习尽可能好的动作action,使其后续获得的奖励尽可能的大。
假设在时刻t时,处于状态长期奖励为:
其中 r t + n r_{t+n} rt+n为t+n时获得的局部奖励, γ γ γ为下一期奖励传递到当期的衰减因子。则状态s的价值为 G t G_t Gt的条件期望:
同样定义状态s时执行动作a的价值也为 G t G_t Gt的条件期望:
可知: E ( Q π ( s , a ) ) = V π ( s ) E(Q_π(s,a))=V_π(s) E(Qπ(s,a))=Vπ(s)
下面直接给出深度学习最核心的Bellman 公式
Bellman 公式十分的直观, V π ( s ) V_π(s) Vπ(s)=根据动作走到下个状态的奖励+下个状态长期价值*衰减值的期望。价值会不断的传递,因此可以看出 V π ( s ) V_π(s) Vπ(s)衡量的是状态s的长期价值。
因为RL需要是Agent不断变强,就可以理解为让状态或让动作的价值不断变大,因此会选择根据如下方式获得新的 V π ( s ) V_π(s) Vπ(s)和 Q π ( s , a ) Q_π(s,a) Qπ(s,a)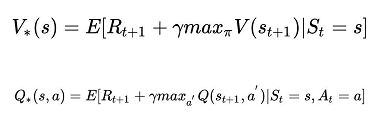
上面几个公式是强化学习的精髓
SARSA算法是一种典型性的value-based和on-policy的算法。下面直接给出SARSA的算法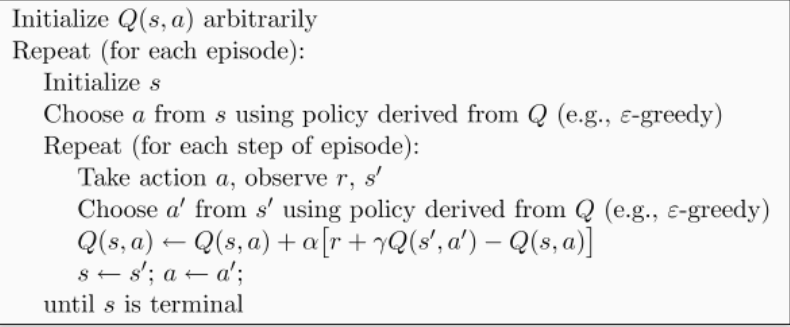
SARSA的算法中有几个需要注意的地方下面用彩色标记标记出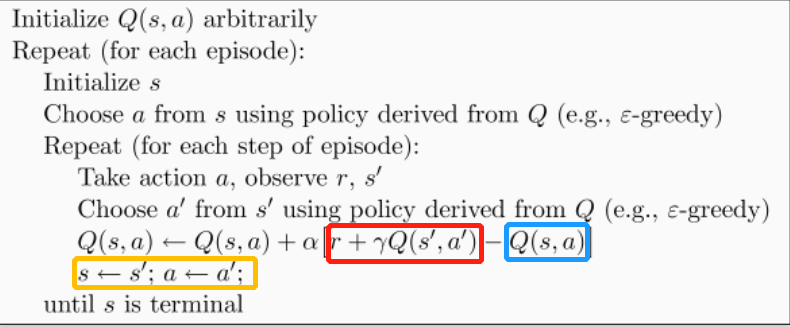
由于与环境进行了实际的交互,因此会执行动作a后到达状态s’,agent会根据状态s’直接执行动作a’。上面算法图中红框为新的状态s和动作a的价值,即 Q ∗ ( s , a ) Q_*(s,a) Q∗(s,a),蓝色框是旧的 Q ( s , a ) Q(s,a) Q(s,a),可以看出 Q ( s , a ) Q(s,a) Q(s,a)的更新方法与梯度下降十分的类似。还需要注意到,在循环中黄色框,循环末尾将s’估值给s,将动作a’赋值给a,带到下一次循环中进行运算,说明agent真的与环境进行实际交互。这是算法为on-policy的关键。
二、SARSA代码
此处直接参考莫烦python的强化学习教程进行代码编写,在基础上说明每一行代码的用途
1.environment的编写
首先RL需要一个环境,因为我们控制不了环境(比如下围棋时我们不不能改变棋盘的大小,何落子方式,只能只能在范围内落在线与线之间的交叉点上),这个环境是不可以改变的,因此后面的Q-learning也将沿用此环境。通常不同的问题有不同环境,我们真正需要关注的是agent即算法逻辑的编写。
此处以走方格为例编写一个environment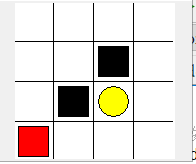
其中红色点为当前所在位置,走到黄色点获得奖励1,走到黑色点获得奖励-1
"""Reinforcement learning maze example.Red rectangle: explorer.Black rectangles: hells [reward = -1].Yellow bin circle: paradise [reward = +1].All other states: ground [reward = 0].This script is the environment part of this example. The RL is in RL_brain.py.View more on my tutorial page: https://morvanzhou.github.io/tutorials/"""import numpy as npimport timeimport sysif sys.version_info.major == 2:import Tkinter as tkelse:import tkinter as tkUNIT = 40 # pixelsMAZE_H = 4 # grid heightMAZE_W = 4 # grid widthclass Maze(tk.Tk, object):def __init__(self):super(Maze, self).__init__()self.action_space = ['u', 'd', 'l', 'r']self.n_actions = len(self.action_space)self.title('maze')self.geometry('{0}x{1}'.format(MAZE_H * UNIT, MAZE_H * UNIT))self._build_maze()def _build_maze(self):self.canvas = tk.Canvas(self, bg='white',height=MAZE_H * UNIT,width=MAZE_W * UNIT)# create gridsfor c in range(0, MAZE_W * UNIT, UNIT):x0, y0, x1, y1 = c, 0, c, MAZE_H * UNITself.canvas.create_line(x0, y0, x1, y1)for r in range(0, MAZE_H * UNIT, UNIT):x0, y0, x1, y1 = 0, r, MAZE_W * UNIT, rself.canvas.create_line(x0, y0, x1, y1)# create originorigin = np.array([20, 20])# hellhell1_center = origin + np.array([UNIT * 2, UNIT])self.hell1 = self.canvas.create_rectangle(hell1_center[0] - 15, hell1_center[1] - 15,hell1_center[0] + 15, hell1_center[1] + 15,fill='black')# hellhell2_center = origin + np.array([UNIT, UNIT * 2])self.hell2 = self.canvas.create_rectangle(hell2_center[0] - 15, hell2_center[1] - 15,hell2_center[0] + 15, hell2_center[1] + 15,fill='black')# create ovaloval_center = origin + UNIT * 2self.oval = self.canvas.create_oval(oval_center[0] - 15, oval_center[1] - 15,oval_center[0] + 15, oval_center[1] + 15,fill='yellow')# create red rectself.rect = self.canvas.create_rectangle(origin[0] - 15, origin[1] - 15,origin[0] + 15, origin[1] + 15,fill='red')# pack allself.canvas.pack()def reset(self):self.update()time.sleep(0.5)self.canvas.delete(self.rect)origin = np.array([20, 20])self.rect = self.canvas.create_rectangle(origin[0] - 15, origin[1] - 15,origin[0] + 15, origin[1] + 15,fill='red')# return observationreturn self.canvas.coords(self.rect)def step(self, action):s = self.canvas.coords(self.rect)base_action = np.array([0, 0])if action == 0: # upif s[1] > UNIT:base_action[1] -= UNITelif action == 1: # downif s[1] < (MAZE_H - 1) * UNIT:base_action[1] += UNITelif action == 2: # rightif s[0] < (MAZE_W - 1) * UNIT:base_action[0] += UNITelif action == 3: # leftif s[0] > UNIT:base_action[0] -= UNITself.canvas.move(self.rect, base_action[0], base_action[1]) # move agents_ = self.canvas.coords(self.rect) # next state# reward functionif s_ == self.canvas.coords(self.oval):reward = 1done = Trues_ = 'terminal'elif s_ in [self.canvas.coords(self.hell1), self.canvas.coords(self.hell2)]:reward = -1done = Trues_ = 'terminal'else:reward = 0done = Falsereturn s_, reward, donedef render(self):time.sleep(0.1)self.update()def update():for t in range(10):s = env.reset()while True:env.render()a = 1s, r, done = env.step(a)if done:breakif __name__ == '__main__':env = Maze()env.after(100, update)env.mainloop()
2.agent的编写
通常不同的问题有不同环境,我们真正需要关注的是agent即算法逻辑的编写。
from maze_env import Maze #即为上面的environmentimport numpy as npimport pandas as pd#RL的父类定义class RL(object):#初始化#actions为可选动作, learning_rate为学习率,reward_decay为传递奖励是的递减系数gamma,1-e_greed为随机选择其他动作的概率def __init__(self, actions, learning_rate=0.01, reward_decay=0.9, e_greedy=0.9):self.actions = actionsself.lr = learning_rateself.gamma = reward_decayself.epsilon = e_greedy#初始化qtable,行为observation的state, 列为当前状态可以选择的action(对于所有列,可以选择的action一样)self.q_table = pd.DataFrame(columns = self.actions, dtype=np.float64)def choose_action(self, observation):self.check_state_exist(observation) #检查当前状态是否存在,不存在就添加这个状态if np.random.uniform() < self.epsilon:state_action = self.q_table.loc[observation, :] #找到当前状态可以选择的动作#由于初始化或更新后一个状态下的动作值可能是相同的,为了避免每次都选择相同动作,用random.choice在值最大的action中损及选择一个action = np.random.choice(state_action[state_action==np.max(state_action)].index)else:action = np.random.choice(self.actions) #0.1的几率随机选择动作return actiondef check_state_exist(self, state):if state not in self.q_table.index:#若找不到该obversation的转态,则添加该状态到新的qtable#新的state的动作的q初始值赋值为0,列名为dataframe的列名,index为stateself.q_table = self.q_table.append(pd.Series([0]*len(self.actions), index=self.q_table.columns, name=state))#不同方式的学习方法不同,用可变参数,直接passdef learning(self, *args):passclass SarsaTable(RL): #继承上面的RL#初始化#参数自己定义,含义继承父类RL#类方法choose_action、check_state_exist自动继承RL,参数不变def __init__(self, actions, learning_rate=0.01, reward_decay=0.9, e_greedy=0.9):super(SarsaTable, self).__init__(actions, learning_rate, reward_decay, e_greedy)def learning(self, s, a,r, s_, a_):self.check_state_exist(s_) #检查动作后状态s_是否存在q_old = self.q_table.loc[s, a] #旧的q[s,a]值if s_!='terminal':#取下个状态s_和动作a_下q值q_predict = self.q_table.loc[s_, a_]q_new = r+self.gamma*q_predict #计算新的值else:q_new = rself.q_table.loc[s,a] = q_old - self.lr*(q_new - q_old) #根据更新公式更新,类似于梯度下降def update():for episode in range(100):#初始化环境observation = env.reset()#根据当前状态选行为action = RL.choose_action(str(observation))while True:# 刷新环境env.render()# 在环境中采取行为, 获得下一个 state_ (obervation_), reward, 和是否终止observation_, reward, done = env.step(action)#根据observation_选择observation_下应该选择的动作action_action_ = RL.choose_action(str(observation_))#从当前状态state,当前动作action,奖励r,执行动作后state_,state_下的action_,(s,a,r,s,a)RL.learning(str(observation), action, reward, str(observation_), action_)# 将下一个当成下一步的 state (observation) and action。#与qlearning的却别是sarsa在observation_下真正执行了动作action_,供下次使用#而qlearning中下次状态observation_时还要重新选择action_observation = observation_action = action_# 终止时跳出循环if done:break# 大循环完毕print('game over')env.destroy()if __name__ == "__main__":env = Maze()#Sarsa和SarsaLambda的调用方式一模一样#RL = SarsaTable(actions=list(range(env.n_actions)))RL = SarsaLambdaTable(actions=list(range(env.n_actions)))env.after(100, update)env.mainloop()

























:删除排序链表中的重复元素")


还没有评论,来说两句吧...