[嵌入式开发模块]JY61姿态角度传感器 驱动模块
文章目录
- 前言
- JY61简介
- 概述
- 通信协议
- 驱动文件
- JY61Driver.h
- JY61Recver.c
- JY61Cmder.c
- 依赖
- 使用示例
- 更新历史
前言
干活中用到了JY61姿态角度传感器,写了相应的驱动程序,放出来。
驱动被设计为拥有指令器和接收机两个部分,完全被动方式运行,与具体的平台解耦,只支持串口通讯。
JY61简介
概述
JY61姿态角度传感器 六轴模块
- 采用高精度的陀螺加速度计MPU6050,通过处理器读取MPU6050的测量数据然后通过串口输出,免去了用户自己去开发MPU6050复杂的IIC协议,同时精心的PCB布局和工艺保证了MPU6050收到外接的干扰最小,测量的精度最高。
- 模块内部自带电压稳定电路,可以兼容3.3V/5V的嵌入式系统,连接方便。
- 采用先进的数字滤波技术,能有效降低测量噪声,提高测量精度。
- 模块保留了MPU6050的IIC接口,以满足用户访问底层测量数据(加速度、角速度)的需求。
- 模块内部集成了姿态解算器,配合动态卡尔曼滤波算法,能够在动态环境下准确输出模块的当前姿态,姿态测量精度0.05度,稳定性极高。

通信协议
(1)串口通信参数
- 电平:TTL
- 波特率:9600/115200 bps
- 停止位:1
- 校验位0
(2)数据包
模块发送至上位机每帧数据分为3个数据包,分别为加速度包、角速度包和角度包,3个数据包顺序输出。波特率115200时每隔10ms输出一帧数据。
加速度包:
 角速度包:
角速度包:
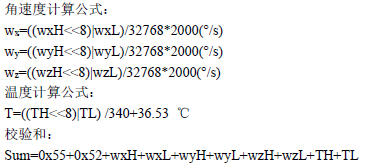
角度包:


(3)控制指令

以上都是从数据手册上复制黏贴下来的,很复杂吧。
但是没事!驱动程序已经都帮你搞定了!
驱动文件
JY61Driver.h
/********************************************************************************************** JY61 DRIVER MODULE* JY61驱动模块** File : JY61Driver.h* By : Lin Shijun(https://blog.csdn.net/lin_strong)* Date : 2020/05/03* version: V1.0* History: 2020/05/03 V1.0 the prototype* Note : The JY61 driver is divided into two part, i.e. cmder and recver. The cmder is for* sending the JY61 command. The recver is for resolving data from the JY61.*********************************************************************************************/#ifndef JY61DRIVER_H#define JY61DRIVER_H/******************************************************************************************** INCLUDE*******************************************************************************************/#include <stdint.h>/******************************************************************************************** DEBUG CONFIGURATION*******************************************************************************************/// to enable debug messages in this module// #define JY61_DEBUG/******************************************************************************************** TYPE DEFINE*******************************************************************************************/typedef enum {JY61DT_Acc, // AccelerationJY61DT_AgV, // Angular VelocityJY61DT_Ang, // Angle} JY61DataType;typedef struct JY61STRUCT_DATA{JY61DataType t;// m/s^2 when t = Acc// °/s when t = AgV// ° when t = Angfloat x;float y;float z;float temp; // ℃} JY61Data;typedef void (* JY61FUNC_DATA)(const JY61Data * data);/************************************************************************************** INTERFACES*************************************************************************************/void JY61Cmder_Init(void (* outChannel)(uint8_t *buf, uint16_t len));void JY61Cmder_Destroy(void);void JY61Cmder_InitializeAngle(void);void JY61Cmder_CalibrateAccelerometer(void);void JY61Cmder_SleepOrWakeup(void);void JY61Cmder_SerialOutput(void);void JY61Cmder_IICOutput(void);void JY61Cmder_BaudRate115200(void);void JY61Cmder_BaudRate9600(void);void JY61Cmder_HorizontalInstall(void);void JY61Cmder_VerticalInstall(void);void JY61Recver_Init(JY61FUNC_DATA onRecvData);// Call it to modify the call-back function.void JY61Recver_RegisterCallback(JY61FUNC_DATA onRecvData);void JY61Recver_CleanupBuffer(void);// Feed the receiver every byte received so that receiver can notify user// the resolved data for each frame.void JY61Recver_Feed(uint8_t nextByte);void JY61Recver_Destroy(void);#endif // of JY61DRIVER_H
JY61Recver.c
/********************************************************************************************** JY61 RECEIVER MODULE* JY61驱动模块 - 接收机** File : JY61Recver.c* By : Lin Shijun(https://blog.csdn.net/lin_strong)* Date : 2020/05/03* version: V1.0* History: 2020/05/03 V1.0 the prototype* Note :*********************************************************************************************//*********************************************************************************************** INCLUDES**********************************************************************************************/#include <string.h>#include <ctype.h>#include "JY61Driver.h"#include "RxMac.h"/*********************************************************************************************** CONSTANT**********************************************************************************************/#define JY61DF_LEN 11 // length of JY61 data frame/*********************************************************************************************** TYPE DEFINITION**********************************************************************************************/typedef struct JY61FRAME_STRUCT{uint8_t headByte; // 0x55uint8_t cmdByte;uint8_t xL;uint8_t xH;uint8_t yL;uint8_t yH;uint8_t zL;uint8_t zH;uint8_t TL;uint8_t TH;uint8_t Sum;} JY61Frame;typedef struct JY61RS_STRUCT{int16_t x;int16_t y;int16_t z;int16_t temp;} JY61ResolvedInt;/*********************************************************************************************** LOCAL FUNCTION**********************************************************************************************/#define ARRAYSIZE(arr) (sizeof(arr)/ sizeof(arr[0]))static void _onFlushed(RxMac sender,RxMacPtr buf,uint16_t len,RxState state,RxFlag HorU,RxFlag Ender);/*********************************************************************************************** LOCAL VARIABLE**********************************************************************************************/static const char * _str_JY61Recver = "JY61Recver";static JY61FUNC_DATA _onRecvData;static const uint8_t _flag_headerAcc[] = {(uint8_t)0x55, (uint8_t)0x51};static const uint8_t _flag_headerAgV[] = {(uint8_t)0x55, (uint8_t)0x52};static const uint8_t _flag_headerAng[] = {(uint8_t)0x55, (uint8_t)0x53};static const RXFLAG_STRUCT _flags[] = {{_flag_headerAcc, sizeof(_flag_headerAcc), RXFLAG_OPTION_HEADER},{_flag_headerAgV, sizeof(_flag_headerAgV), RXFLAG_OPTION_HEADER},{_flag_headerAng, sizeof(_flag_headerAng), RXFLAG_OPTION_HEADER}};static RxMac _mac;static uint8_t _macBuf[JY61DF_LEN];/*********************************************************************************************** INTERFACE IMPLEMENTATION**********************************************************************************************/void JY61Recver_Init(JY61FUNC_DATA onRecvData){_onRecvData = onRecvData;_mac = RxMac_Create(_flags, ARRAYSIZE(_flags), _macBuf, sizeof(_macBuf),NULL, NULL, _onFlushed);if(_mac == NULL)for(;;);}void JY61Recver_Destroy(){_onRecvData = NULL;RxMac_Destroy(_mac);}void JY61Recver_RegisterCallback(JY61FUNC_DATA onRecvData){_onRecvData = onRecvData;}void JY61Recver_CleanupBuffer(void){RxMac_ResetState(_mac);}void JY61Recver_Feed(uint8_t nextByte){RxMac_FeedData(_mac, nextByte);}/*********************************************************************************************** LOCAL FUNCTION IMPLEMENTATION**********************************************************************************************/static int _frameSumRight(const uint8_t * frame){uint8_t sum = 0;int i;for(i = 0; i < 10; i++)sum += frame[i];return sum == frame[10];}static void _frameResolve(JY61ResolvedInt *rst, const JY61Frame *frame){rst->x = (((int16_t)frame->xH) << 8) | frame->xL;rst->y = (((int16_t)frame->yH) << 8) | frame->yL;rst->z = (((int16_t)frame->zH) << 8) | frame->zL;rst->temp = (((int16_t)frame->TH) << 8) | frame->TL;}static void _onFlushed(RxMac sender,RxMacPtr buf,uint16_t len,RxState state,RxFlag HorU,RxFlag Ender){JY61Data data;JY61ResolvedInt rData;if(_onRecvData == NULL || !state.headerFound)return;if(!_frameSumRight((const uint8_t *)buf))return;_frameResolve(&rData, (const JY61Frame *)buf);data.x = rData.x / 32768.0f;data.y = rData.y / 32768.0f;data.z = rData.z / 32768.0f;switch (buf[1]){case 0x51:data.t = JY61DT_Acc;data.x *= 16;data.y *= 16;data.z *= 16;break;case 0x52:data.t = JY61DT_AgV;data.x *= 2000;data.y *= 2000;data.z *= 2000;break;case 0x53:data.t = JY61DT_Ang;data.x *= 180;data.y *= 180;data.z *= 180;break;default:// will never hit herereturn;}data.temp = (float)rData.temp / 340.0f + 36.53f;_onRecvData(&data);}
JY61Cmder.c
/********************************************************************************************** JY61 COMMANDER MODULE* JY61驱动模块 - 指令器** File : JY61Cmder.c* By : Lin Shijun(https://blog.csdn.net/lin_strong)* Date : 2020/05/03* version: V1.0* History: 2020/05/03 V1.0 the prototype* Note :*********************************************************************************************//*********************************************************************************************** INCLUDES**********************************************************************************************/#include <stdio.h>#include "JY61Driver.h"/*********************************************************************************************** LOCAL VARIABLE**********************************************************************************************/static void (* _out)(uint8_t *buf, uint16_t len) = NULL;/*********************************************************************************************** CONSTANT**********************************************************************************************/#define JY61CMDBYTE_INITANGLE 0x52#define JY61CMDBYTE_CALIACCMETER 0x67#define JY61CMDBYTE_SLEEPORWAKE 0x60#define JY61CMDBYTE_OUTPUTSERIAL 0x61#define JY61CMDBYTE_OUTPUTIIC 0x62#define JY61CMDBYTE_BAUDRATE115200 0x63#define JY61CMDBYTE_BAUDRATE9600 0x64#define JY61CMDBYTE_HORINSTALL 0x65#define JY61CMDBYTE_VERINSTALL 0x66/*********************************************************************************************** INTERFACE IMPLEMENTATION**********************************************************************************************/void JY61Cmder_Init(void (* outChannel)(uint8_t *buf, uint16_t len)){_out = outChannel;}void JY61Cmder_Destroy(){_out = NULL;}static void _sendCmd(uint8_t cmdByte){static uint8_t frame[3] = {0xFF, 0xAA};if(_out == NULL)return;frame[2] = cmdByte;_out(frame, sizeof(frame));}void JY61Cmder_InitializeAngle(){_sendCmd(JY61CMDBYTE_INITANGLE);}void JY61Cmder_CalibrateAccelerometer(void){_sendCmd(JY61CMDBYTE_CALIACCMETER);}void JY61Cmder_SleepOrWakeup(void){_sendCmd(JY61CMDBYTE_SLEEPORWAKE);}void JY61Cmder_SerialOutput(void){_sendCmd(JY61CMDBYTE_OUTPUTSERIAL);}void JY61Cmder_IICOutput(void){_sendCmd(JY61CMDBYTE_OUTPUTIIC);}void JY61Cmder_BaudRate115200(void){_sendCmd(JY61CMDBYTE_BAUDRATE115200);}void JY61Cmder_BaudRate9600(void){_sendCmd(JY61CMDBYTE_BAUDRATE9600);}void JY61Cmder_HorizontalInstall(void){_sendCmd(JY61CMDBYTE_HORINSTALL);}void JY61Cmder_VerticalInstall(void){_sendCmd(JY61CMDBYTE_VERINSTALL);}
依赖
接收器的实现依赖于我写的通用接收机:
通用接收状态机模块
使用示例
使用此模块基本分几步:
- 初始化模块
- 如需要发送指令则实现并注册信道给指令器;注册回调函数给接收器,这样接收器在发现完整的数据帧时就会通过回调函数进行通知。
- 不断接收数据,并喂(Feed)给接收器;如需要发指令,随时调用指令器的接口。
以下代码示例了在上电后发送校准指令,然后进入自动模式,之后不断读取数据并进行解析(假设使用标准输入输出上的串口和JY61通信):
#include "JY61Driver.h"#include <stdio.h>#include <stdint.h>……// 收到数据的回调函数static void onDataResolved(const JY61Data * data);// 发送信道static void sendChannel(uint8_t *buf, uint16_t len);void main(){uint8_t b;……JY61Recver_Init(onDataResolved);JY61Cmder_Init(sendChannel);// 可以发送各种命令,比如// JY61Cmder_HorizontalInstall();for(;;){// 不断得到下一个字节并喂给接收机// 接收机会通过回调函数实时传递解析出来的值b = (uint8_t)getchar();JY61Recver_Feed(b);}}static void onDataResolved(const JY61Data * data){// 这里会得到实时解析到的各个包的数据switch(data->t){case JY61DT_Acc:// 加速度包的处理break;case JY61DT_AgV:// 角速度包的处理break;case JY61DT_Ang:// 角度包的处理break;default:// 不应该会到这break;}}static void sendChannel(uint8_t *buf, uint16_t len){// 往标准输出输出这个字节while(len-- > 0)putchar((char)*buf++);}
更新历史
2020/06/07 放出V1.0




























还没有评论,来说两句吧...